
In Bremen werden Brennteile für stahl- und metallverarbeitende Unternehmen wie Werften und Schiffbauzulieferern oder Maschinenbauer bis zu Stahlbauunternehmen bearbeitet. Bislang haben Mitarbeiter die Entgrat-Bearbeitung großflächiger und schwerer Stahlteile manuell durchgeführt. Diese körperlich anstrengende und gefährliche Tätigkiet übernimmt nun das Robotersystem – zeit- und kosteneffizienter, sicherer und präziser. Darüber hinaus ermöglicht der Roboter auch Schleifvorgänge, die für eine manuelle Ausführung unmöglich wären. Selbst der Verschleiß der Schleifwerkzeuge wird dabei automatisch überwacht.
„Diese bislang in der europäischen Stahlindustrie einzigartige Anlage ist für uns der nächste wichtige Schritt in der digitalisierten Stahlbearbeitung, mit der wir unseren Kunden qualitativ anspruchsvolle und präzise Werk- und Bauteile mit einer hohen Wiederholgenauigkeit anbieten können,“ so Bernhard Weiß, CEO Europa Klöckner & Co und CEO Kloeckner Metals Germany. „Wir belegen hiermit einmal mehr unsere Innovationsführerschaft in der Stahlindustrie und investieren nachhaltig in die weitere Verbesserung der Arbeitssicherheit.“
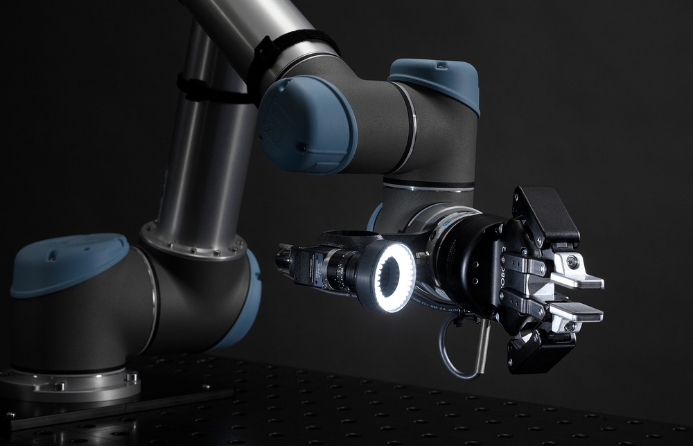
Das Entgratroboter-System hat Kloeckner gemeinsam mit dem Automatisierungsexperten Teqram entwickelt. Mit einem ABB-Industrieroboter IRB 6700–245 sowie 3D-Vision führt die Anlage die Erkennung und Nachbearbeitung von Brennteilen automatisch durch und bearbeitet diese mit einer Auswahl von fünf Standardwerkzeugen (zwei Meißel, je ein horizontaler und waagerechter Winkelschleifer, ein Stiftfräser sowie ein Magnetarm).
Der vier Meter hohe Sechsachs-Roboter von ABB hat eine Armreichweite von 3 Metern sowie eine Traglastfähigkeit von bis zu 250 kg im Pick & Place Betrieb.
Die Bedienung des Roboters erfolgt dabei mittels Teqrams Software Easygrinder, die mit dem Roboter und der Kamera für die 3D Vision sowie einer Kamera für die Umfeldüberwachung kommuniziert. Mit dem 3D Vision Kamerasystem EasyEye kann der Roboter das Werkteil identifizieren, indem Konturen und Formen erfasst werden, und für eine genaue Positionierung aller zu bearbeitenden Bauteile sorgen. Der Roboter nimmt das Produkt auf, wählt das richtige Werkzeug aus einem Gestell, schließt es mit einem pneumatischen Verschluss an den Roboterarm an und startet mit der Bearbeitung: Vor- und Entschlacken, Schleifen, Fräsen, Vorrunden und Senken.
Kloeckner Metals Germany GmbH (KMG)
Mehr zum Thema Robotik








{kind=link}