

Beim Bildaufnahmeverfahren 3D-Snapshot nehmen die Kameras nicht nur ein Bild auf, sondern bestimmen auch die Distanz zwischen der Kamera und den Objekten. Die hohe Tiefenauflösung der 3D-Bilder kommt insbesondere der präzisen Roboterführung zu Gute. An dem Projekt zur robotergestützten Depalettierung im Wareneingang war auch der Vision-Integrator Neadvance mit seiner 3D-Bildverarbeitungslösung zur Lage- und Positionsbestimmung von Kisten und Kartons beteiligt.
Vor der Einführung des automatischen Wareneingangssystems wurden bei dem tschechischen Automobilhersteller Bauteile wie Schrauben, Spiegel oder Armaturenelemente händisch von der Palette genommen, datentechnisch erfasst und auf ihren Weg zu einem Lagerort oder direkt in die Fahrzeugproduktion geschickt. Dieses Depalettieren der angelieferten Bauteile sollte nun mithilfe eines Knickarmroboters gelöst werden. Dafür muss der Depalettierroboter die Position der einzelnen Pakete auf der Palette auf der Palette selbstständig erkennen können – auch bei unterschiedlichen Beladungsmustern und Verpackungseinheiten oder Positionsveränderungen.
Sensor sendet Infrarotlicht
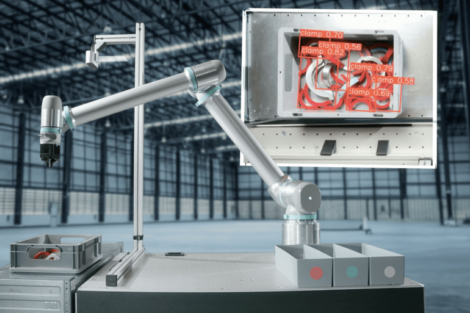
Gelöst wurde dies mit dem 3D-Snapshot-Sensor Visionary-T, der die Robotersteuerung mit Messwerten zu Form, Ausrichtung und Abstand von Objekten auf der Palette versorgt. Visionary-T ermittelt Abstands- und Größeninformationen von Objekten durch 3D-Lichtlaufzeitmessung (3DToF). Dafür sendet der Sensor Infrarotlicht aus, welches an den Objekten in der Umgebung reflektiert wird. Aus der Phasenverschiebung berechnet der Sensor die Distanz und stellt diese in einer dreidimensionalen Punktwolke dar.
Die Algorithmen von Neadvance nutzen dann die 3D-Bildinformationen, um Form, Ebene und Ausrichtung von Kisten und Karton zu bestimmen. Damit erkennt die Robotersteuerung, welcher Behälter als nächstes kollisionsfrei angefahren und am besten gegriffen werden kann – und kann die Zielkoordinaten für die automatische Bahnführung des Roboters berechnen. Der 3D-Snapshot-Sensor Visionary-T ist dazu direkt am Knickarmroboter montiert. Wenn dieser sich über die Palette bewegt, nimmt der Sensor in der Bewegung Aufnahmen der Palettenoberfläche auf.
Der robuste Sensoraufbau – widerstandsfähiges Metallgehäuse, keine beweglichen Teile im Inneren – gewährleistet eine hohe Ausfallsicherheit bei zugleich geringem Wartungsaufwand. Die hohe Bildwiederholrate von bis zu 50 Bildern pro Sekunde stellt zudem sicher, dass auch während der dynamischen Beschleunigungen und Reversierbewegungen des Roboters sowie bei reflektierenden Oberflächen oder anderen schwierigen Bedingungen die messtechnische Präzision und Zuverlässigkeit für die Roboterführung erhalten bleibt.
Der Roboter fährt die Palette an, nimmt mit seiner speziellen Greifvorrichtung die Ware sicher auf und legt die Kiste oder den Karton auf dem Förderband ab. Die Dynamik des Roboters und die Schnelligkeit der 3D-Erfassung der Palettenoberfläche haben den Depalettierprozess wesentlich beschleunigt, den Durchsatz im Wareneingang signifikant erhöht und die Mitarbeiter von einer wiederkehrenden Tätigkeit entlastet. Die neue Depalettierungslösung arbeitet so zuverlässig und effizient, dass der Automobilhersteller sie auch in anderen Werken einsetzen will.
Sick AG
Erwin-Sick-Straße 1
79183 Waldkirch
Mehr zum Thema Robotik







{kind=link}