

Der Roboter erkennt damit Abweichungen in der Bauteilposition sowie Spalte im Nahtverlauf. Anhand der festgestellten Positionspunkte korrigiert der Roboter dabei den Schweißnahtverlauf und passt ihn exakt an. Das vereinfacht das Programmieren der Schweißbahn und spart Material, Zeit sowie Kosten, weil Nacharbeit und Bauteilausschuss entfallen.
Serienweise perfekte Nähte
Das Assistenzsystem TouchSense wurde speziell für Kehlnähte entwickelt. Der Roboter berührt vor jeder Schweißung automatisch die Bleche am Beginn und am Ende der Schweißnaht. Dabei ist egal, wer die Berührung auslöst – Drahtelektrode oder Gasdüse. Das Signal wird immer eindeutig zugeordnet und korrekt übergeben.
Beim Kontakt erzeugt die niedrige Sensorspannung einen Kurzschluss. Dieser ermöglicht dem Roboter, die Nahtposition exakt zu bestimmen und die Schweißparameter dynamisch anzupassen. Sehr hilfreich ist darüber hinaus auch die sofortige Warnung, sollte sich zwischen Kontaktrohr und Gasdüse eine Spritzerbrücke bilden. So kann diese rechtzeitig gereinigt werden, was die Präzision und Qualität in der Fertigung erhöht.
Präzision dank CMT-Technologie
Die Genialität von WireSense liegt in der Einfachheit. „Wir haben unseren hochsensiblen und dynamischen CMT-Antrieb um eine spezielle Reglersoftware erweitert. So kann der Schweißdraht als Sensor direkt am Bauteil Konturen oder Spaltabweichungen ertasten“, berichtet Philipp Schlor, Strategic Product Manager, Industrial Welding Solutions bei Fronius International.
Um die präzise Kontrolle des Schweißdrahtes zu gewährleisten, muss das Fronius Schweißsystem lediglich mit einem CMT Ready-System ausgestattet sein. Das WeldingPackage, also der Schweißprozess CMT (Cold Metal Transfer) selbst, ist dazu nicht nötig.
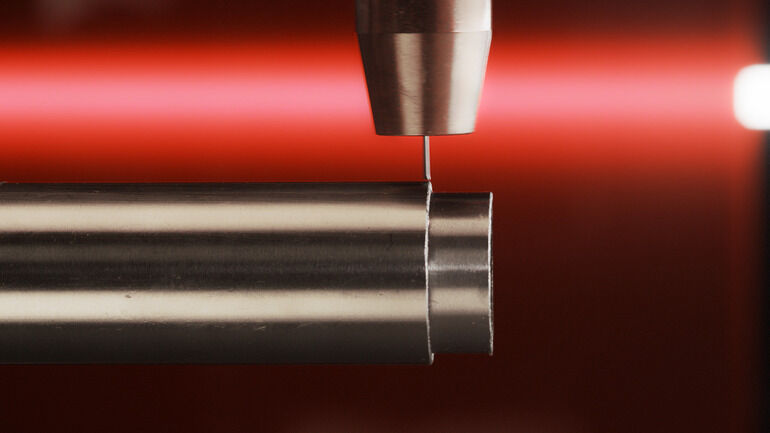
Die Drahtelektrode wird bei WireSense auch zum Höhensensor. So können beispielsweise bei Überlappnähten anhand der exakt vermessenen Blechkantenhöhe Spalte festgestellt werden. Für ein perfektes Ergebnis ist es dadurch möglich, im Vorfeld genau zu definieren, auf welche im Fronius Schweißsystem hinterlegten Jobs bei unterschiedlichen Spaltmaßen zurückgegriffen werden soll. Infolgedessen kann der Roboter immer adäquat reagieren und die Schweißung mit jenen Parametern ausführen, die an das jeweilige Spaltmaß ideal angepasst sind.
Nahtverfolgung beim Schweißen
Das Assistenzsystem SeamTracking spielt seine Vorzüge insbesondere bei der Fertigung von Schienen- oder Baufahrzeugen aus. Werden dicke Bleche oder lange Nähte geschweißt, kann der Wärmeeintrag zu Bauteilverzug führen. Damit der Roboter trotzdem an der richtigen Stelle schweißt, bedarf es eines Systems, das während des Schweißvorgangs, etwa bei einer Kehlnaht oder angearbeiteten Stumpfnaht, die Schweißposition zuverlässig erkennt.
Dafür pendelt der Roboter während des Schweißens zwischen den beiden Blechen hin und her. Die dabei festgestellten Ist-Werte wandelt der Schweißregler in Signale für die Robotersteuerung um. Anhand dieser Signale erkennt der Roboter die vorgesehene Schweißposition beziehungsweise mögliche Abweichungen und korrigiert die Bahn automatisch.
Roboter schneller programmieren
Das A und O für hohe Qualität liegt jedoch bereits im Teachen der korrekten Schweißbahn. Der bewährte TeachMode unterstützt beim Festlegen der Schweißnahtpositionen am Roboter und macht den Programmiervorgang sehr effizient. Hier verhindert die reversierende Drahtbewegung das Verbiegen des Drahtes bei einer Berührung mit dem Bauteil und erspart den Anwendern das Abtrennen des deformierten Drahtes sowie das neuerliche Abmessen des Stickouts.
Fazit
Kurzum: Drahtbasierte Assistenzsysteme sparen Kosten, Zeit und Ressourcen. Denn wird die ohnehin vorhandene Drahtelektrode als Sensor genutzt, spart das nicht nur Kosten und Wartungsaufwand für zusätzliche Sensor-Hardware, sondern schafft auch Freiraum, da die Bauteilzugänglichkeit in keiner Weise eingeschränkt wird. Gleichzeitig reduzieren die Fronius Assistenzsysteme Ausschuss und aufwendige Nacharbeit, weil zuverlässig an der korrekten Position geschweißt wird. Auch das nachträgliche Umprogrammieren der Roboterbahnen wird minimiert, da der Roboter selbstständig den Schweißnahtverlauf korrigieren kann.
Fronius International GmbH
Details zum WireSense mit CMT Ready System
„Unsere revolutionäre WireSense-Technologie nutzt die Abtastfunktion der reversierenden CMT-Drahtbewegung, um die exakte Lage des Bauteils sowie Kantenpositionen und Spalthöhen zu ermitteln. Blechstärken von 0,5 bis 20 Millimeter können auf Stahl und Edelstahl, aber auch bei Aluminium präzise und rasch festgestellt werden“, betont Philipp Schlor, Strategic Product Manager, Industrial Welding Solutions bei Fronius International.
Um die präzise Kontrolle des Schweißdrahtes zu gewährleisten, muss das Fronius Schweißsystem lediglich mit einem CMT Ready-System ausgestattet sein. Diese CMT Ready-Systeme bestehen aus Drahtvorschub an Drahtfass oder -spule, Drahtpuffer und CMT Robacta Drive-Antriebseinheit, also einem zweiten Drahtvorschub direkt am Brenner.
Hochfrequentes Abtasten
Mittels reversierender Drahtbewegung, die bei etwa 100 Hertz stattfindet, tastet der in der Antriebseinheit befindliche Elektromotor die Metalloberfläche mit dem Draht ab. Durch dieses hochfrequente Abtasten des Werkstücks wird die benötigte Genauigkeit erst möglich. Selbst wenn die abzutastende Fläche Unebenheiten aufweist, zum Beispiel in Form von schräg liegenden Blechen, kann die Kante problemlos detektiert und vermessen werden.
Bezogen auf einen Referenzpunkt, der beim Starten des Abtastvorgangs definiert wird, kann jede Hebung und Senkung am Bauteil genauestens registriert werden. Blitzschnell vergleicht der Roboter die geteachten mit den gemessenen Positionen – d. h. er führt einen Abgleich von gespeicherten mit aktuell festgestellten Positionsdaten durch. Gibt es Unterschiede, wird der Nahtverlauf im Koordinatensystem seitens Roboter entsprechend angeglichen und die Schweißung erfolgt an der richtigen Stelle.
Roboter-Integratoren stehen mit WireSense viele Möglichkeiten offen, um hochqualitative Lösungen für herausfordernde Schweißaufgaben zu finden. Es muss nämlich nicht zwingend die zu schweißende Nahtkante detektiert werden. Jede fixe Referenzkante am Bauteil, etwa die Bauteilkante oder eine Stanzung, kann als Ausgangspunkt dienen, von dem aus in einem bestimmten Abstand geschweißt werden soll. Auf diese Weise können auch schwer detektierbare Teile, beispielsweise ein abgerundetes Blech, an der gewünschten Position geschweißt werden.
Mehr zum Thema Robotik









{kind=link}