

Beim manuellen Verpacken kämpfen viele Unternehmen mit einem Arbeitskräftemangel. Verpacken ist eine repetitive, körperlich anstrengende Tätigkeit, für die sich nicht leicht Personal gewinnen lässt. Es ist zudem eine fehleranfällige Aufgabe, die schlecht skalierbar ist und unter hohem Zeit- und Kostendruck erfolgt.
Sollen Pakete mit beliebigem Inhalt automatisiert gepackt werden, gibt es derzeit zwei Ansätze. Der eine erfordert zwar vom Robotersystem keinerlei Vorwissen über die zu verpackenden Objekte. Dies kann jedoch zu Schäden und chaotischer Platzierung führen, da die Objekte willkürlich abgeworfen werden. Die andere Möglichkeit ist, dem Robotersystem umfassendes Wissen über die Objekte zu vermitteln. So könnte es die Objekte systematischer handhaben und ablegen. Momentan lässt sich dieses Wissen häufig jedoch noch nicht wirtschaftlich und effizient bereitstellen.
Ordentlich gepackte Pakete
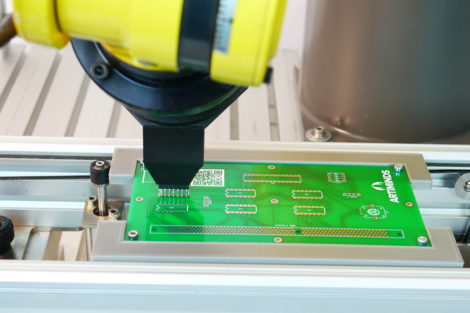
Eine Lösung für dieses Problem ist am Fraunhofer IPA entstanden. Ein neuer Packplaner befähigt ein Robotersystem ohne jegliches Training oder Vorwissen dazu, Objekte zu erkennen und anhand der erkannten Form geordnet in Kartons zu packen. Der Planer braucht hierfür lediglich einen Scan des zu packenden Objekts. Auf dieser Grundlage wird die Packplanung in beliebig vielen rotatorischen Freiheitsgraden durchgeführt.
Der Planer wurde in einer Physiksimulation anhand von verschiedenen Objektformen entwickelt – von Kisten unterschiedlichster Größen über Gebinde auf Paletten, Zylinder bis hin zu homogenen oder gemischten Freiformobjekten. Der Demonstrator veranschaulicht die Anwendung. Er erreicht dabei beeindruckende rund 1300 Griffe pro Stunde. Erste Tests mit Endanwendern und Systemintegratoren laufen bereits.
Der Planer kann auf unterschiedliche Bedarfe binnen weniger Millisekunden dynamisch reagieren, zum Beispiel wenn sich ein Objekt verschoben hat. Dabei berücksichtigt er individuelle oder gelernte Packregeln sowie weitere Kriterien wie Dichte, Stabilität oder die (maximale) Höhe. Auch spezifische Objektausrichtungen, wie das aufrechte Platzieren, können vorgegeben werden. Eine Stabilitätsprüfung für die geplante Lagerung ist ebenfalls möglich.
Erfolge aus Forschungsprojekt
Der Packplaner basiert auf Forschungsergebnissen aus dem Projekt „Sim4Dexterity“. Ziel des Projekts war es, hochwertige, generell einsetzbare und leicht zu bedienende Simulationswerkzeuge zu entwickeln, damit KI-basierte Anwendungen wirtschaftlich und zeiteffizient entstehen und eingesetzt werden können. Ein weiteres Ergebnis sind virtuelle Machbarkeitsuntersuchungen und die virtuelle Einrichtung des Robotersystems.
Im Projekt entstanden realistische Simulationsszenarien, die Kontaktkräfte sowie Taktil- und bildgebende Sensoren beinhalten. Fehlt es für das Training der neuronalen Netze zur Objekterkennung an ausreichend realen Daten, umfasst die Simulation auch Bauteil- und Objektmodellgeneratoren, um mit synthetischen Daten zu arbeiten. So entstanden Simulationsmodelle und Szenen für Anwendungen rund um die Objektmanipulation, z.B. für Bin Picking, Bin Packing, Kitting-, Kommissionier- und Montageanwendungen.
Einsatzmöglichkeiten wie die oben dargestellte modellfreie Packplanung oder das modellfreie Greifen in Hochgeschwindigkeit, das Depalettieren homogener wie gemischter Paletten, das mobile Kommissionieren im Warenlager oder Einzelhandel sowie die modellfreie Handhabung von Leergut in der Getränkelogistik lassen sich auf innovative Art umsetzen.
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Information zum Autor:
Tim Nickel, M.Sc., ist wissenschaftlicher Mitarbeiter im Forschungsteam Handhabungsprozesse und Dexterity am Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA; tim.nickel@ipa.fraunhofer.de
Mehr zum Thema Robotik







{kind=link}