


Mit seiner Roboter-agnostischen und benutzerfreundlichen Software konzentriert sich Wandelbots auf die drei Hauptphasen von Automatisierungsprojekten: Von der Planungsphase (Plan), in der virtuelles Prototyping die Machbarkeit der Robotikanwendung überprüft, über die Bauphase (Build), in der bspw. System Integratoren mit der Wandelbots-Software zu Roboter-App-Entwicklern werden, bis zur abschließenden Betriebsphase (Operate), in der Endanwender mittels einer intuitiven Schnittstelle Roboter autonom bedienen können.
1. Plan Phase
Für die Planungs-Phase zeigt Wandelbots auf seinem SPS-Stand (Halle 6, Stand 151) einen physischen Roboter und sein digitales Gegenstück in der virtuellen Umgebung von Nvidia Omniverse. Die physische Pick and Place Anwendung – durchgeführt von einem Yaskawa Roboter, der mit einen Vakuumsauger Objekte von einem Förderband aufnimmt – findet dabei gleichzeitig in Omniverse statt, denn der Wandelbots-Softwarestack sorgt für eine bidirektionale Verbindung zwischen dem virtuellen und physischen Roboter.
Dabei beschränkt sich Wandelbots aber nicht auf Yaskawa-Roboter: In der virtuellen Szene von Omniverse sind auch zusätzliche Roboterzellen von ABB, Kuka und UR zu sehen, die mit dem Wandelbots-Software Stack integriert sind und verschiedene Anwendungen ausführen.
„Das Besondere ist die bidirektionale Kommunikation zwischen der simulierten und der physischen Welt. Mit unserem Wandelbots-Software Stack überbrücken wir die Lücke zwischen IT und OT. So kann man in Nvidia Omniverse Robotikanwendungen wie Palettieren oder Schleifen genau planen und dabei auf Erreichbarkeit testen und physische Einschränkungen berücksichtigen“, sagt Katharina Jessa, Chief Revenue Officer bei Wandelbots.
2. Build Phase
Wie man Kunden bei der Entwicklung und Konstruktion von Apps unterstützt, zeigt Wandelbots in Nürnberg mit einem intuitiven Interface für Palettieranwendungen. Die benutzerfreundliche Bediensoftware ermöglicht Mitarbeitern, effizient mit Robotern zusammenzuarbeiten, ohne Programmierkenntnisse zu besitzen.
„Das Ziel sind standardisierte Roboterzellen, die sich leicht an verschiedene Palettiermuster, Kartongrößen oder Palettengrößen anpassen lassen, ohne dass der Endanwender den Roboter neu programmieren muss, wenn sich ihre Palettengröße ändert“, sagt Katharina Jessa. „Wir richtet uns damit an Maschinenbauer und Systemintegratoren, die standardisierte Anwendungen wie die vorgestellte Palettierungs-App entwickeln und anbieten wollen.“
SPS-Besucher können dabei die von Wandelbots entwickelte Programmiersprache zur Definition von Robotikfähigkeiten live in Aktion erleben und beobachten, wie einfache Änderungen direkt umgesetzt werden. „Das Einzigartige ist, dass sich die verwendeten Roboter, sowie Greifer nahtlosen austauschen lassen, während die Anwendungseinstellung beibehalten wird – hier kommt die Kraft unseres robot-agnostischen Ansatzes zum Vorschein“, betont Stephan Hotz, Chief Product Officer in Dresden.
Applikationsentwickler benötigen mit der Wandelbots-Plattform keine markenspezifischen Roboterprogrammierkenntnisse mehr, betont Stephan Hotz: „Stattdessen können sie in der von standardisierten Entwicklungsumgebung arbeiten und bei Bedarf die Robotertypen austauschen. Dies beschleunigt die Projektentwicklung erheblich, indem auf vordefinierte Anwendungsvorlagen zurückgegriffen wird.“
3. Operate Phase
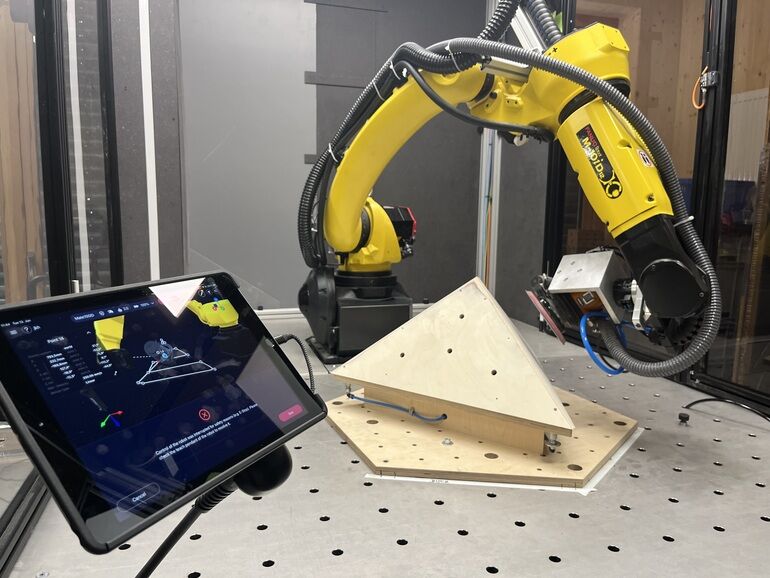
Für die dritte Phase, den Betrieb, zeigt Wandelbots auf der SPS eine Schleifanwendung, die mit einem Fanuc CRX25 Cobot samt Kamera ausgestattet ist. Die Kamera ist darauf ausgelegt, unterschiedliche Werkstücke aus Holz und Metall zu erkennen, ein 3D-Modell jedes Objekts zu erfassen und deren Position im Raum oder auf dem Tisch zu bestimmen. Diese Informationen werden dann mit der Wandelbots Schleifanwendung synchronisiert. Benutzer können das 3D-Werkstück innerhalb der App betrachten und Empfehlungen zur Pfaderzeugung erhalten.
„Was dieses System auszeichnet, ist, dass keine vorherigen Robotik-Kenntnisse erforderlich sind, um die Roboterzelle zu bedienen“, erläutert Stephan Hotz. „Benutzer können einfach einen Knopf drücken, um den Vorgang auszuführen. Zwischen dem Drücken des Knopfes und der Ausführung der Aufgabe haben die Benutzer die Flexibilität, bestimmte Parameter fein abzustimmen und so die vollständige Kontrolle über den Prozess zu haben. Personen, die Schleifaufgaben durchführen, können sich also auf die Positionierung des Werkstücks zu konzentrieren und die Einhaltung von Qualitätskriterien konzentrieren.“
Mit diesem Auftritt auf der SPS sende Wandelbots eine klare Botschaft, betont Katharina Jessa abschließend: „Die Zukunft der Automatisierung besteht nicht nur aus Robotern, sondern aus den Menschen, die sie steuern – und das während des gesamten Lebenszyklus eines Roboters innerhalb eines Automatisierungsprojektes. Und wir wollen diese auf jedem Schritt des Weges unterstützen und befähigen.“
https://wandelbots.com/de; SPS Halle 6, Stand 151
Mehr zum Thema Industrie 4.0









{kind=link}