
Einiges spricht für den Einsatz von kollaborativen oder Leichtbaurobotern bei Schweißaufgaben. Dazu gehören die geringeren Investitionskosten verglichen mit einem klassischen Industrieroboter. Außerdem sind keine festen Installationen erforderlich, sondern der Roboter kann ohne größere Sicherheitsvorkehrungen eingesetzt werden. Die Programmierung ist deutlich vereinfacht und erfordert kein Expertenwissen. Und nicht zuletzt können Roboter die Produktionsfähigkeit steigern, auch wenn das Personal aufgrund des Fachkräftemangels knapp ist. Die Investition in den Roboter amortisiert sich deshalb erfahrungsgemäß schnell wieder.
Der Vorteil der einfacheren Bedienung für Cobots gilt zwar auch im Schweißbetrieb, allerdings ist die Programmierung mittels Teach-In-Verfahren noch immer zeitaufwendig und mühsam. Die Alternative der Offline-Programmierung ist gerade für mittelständische Betriebe oft auch nicht sinnvoll, weil teuer und zudem die CAD-Daten vorliegen müssen.
Um hier Abhilfe zu schaffen und Cobots noch attraktiver für das Schweißen kleinerer bis mittlerer Stückzahlen zu machen, arbeitet das Fraunhofer IPA daran, mit einem zusätzlichen Laserliniensensor am Cobot das Teach-In-Verfahren intuitiver und schneller zu machen. Hierfür arbeitet das IPA mit der Lorch Schweißtechnik GmbH sowie der Haba Hähnle GmbH zusammen.
Sensor erkennt Kehlnähte
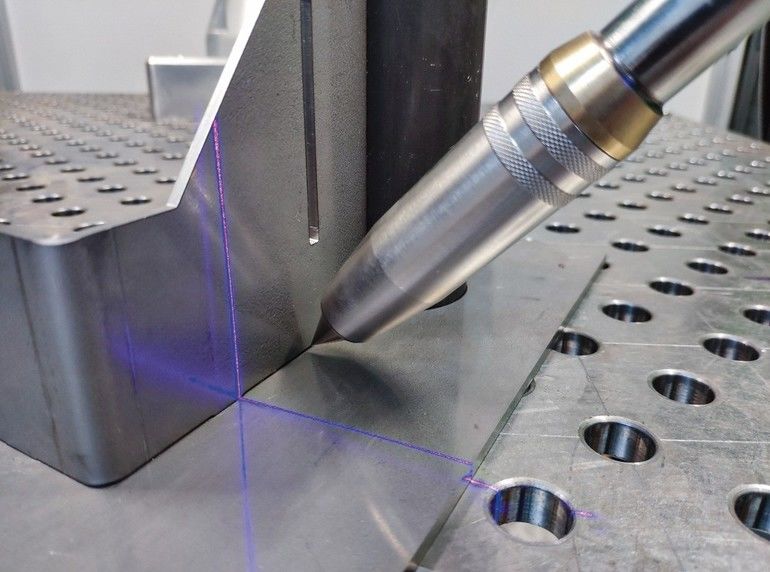
Der Laserliniensensor als technisches Auge erkennt Kehlnähte in Echtzeit und ermöglicht es, den Schweißbrenner präzise auf diese auszurichten. Das dient nicht nur wie in der Schweißrobotik üblich dazu, Toleranzen am Bauteil auszugleichen, sondern kann auch für die Programmierung des Schweißcobots genutzt werden: Der Nutzer muss dazu den Sensor nur grob über der Schweißnaht positionieren und kann dann die Bahn mit einer exakten Positionierung des Schweißbrenners abfahren. Die Steuerung erkennt die Kehlnaht auf Basis der Sensordaten. Durch die interne Kalibrierung kennt der Roboter die Position des Schweißbrenners relativ zum Sensor und kann den Schweißbrenner exakt positionieren.
Damit das Ganze so einfach wie möglich nutzbar ist, hat das Fraunhofer IPA ein URCap erstellt – also eine kleine App, mit der die Funktionen vom Teach-Panel des UR 10e aus bedienbar sind. Das URCap lässt sich mit minimalem Aufwand in bestehende Programme integrieren, sodass der Änderungsaufwand gering bleibt. All das ermöglicht dem Schweißcobot, auch Bauteile mit Abweichungen autonom und in hoher Qualität zu bearbeiten.
Die Funktionsweise im Detail
Beim Start der Funktionen richtet der Roboter den Schweißbrenner auf die Kehlnaht aus. Dabei werden sowohl die Schweißposition als auch Anstell- und Führungswinkel eingehalten, die der Nutzer definiert hat. Weiter gibt der Nutzer die Schweißnahtlänge oder einen Endpunkt ein und der Roboter folgt der Kehlnaht automatisch bis zum Erreichen des Endkriteriums. So können auch Schweißnähte mit Kurvenbahnen einfach programmiert werden. Nicht zuletzt kann der Roboter mithilfe des Sensors seine Bahn in bereits existierenden Programmen an reale Bauteile mit Abweichungen adaptieren.
Aktuell haben die IPA-Wissenschaftler die Anwendung anhand einiger Bauteile getestet. Wer Interesse hat, sein eigenes Bauteil zum Testen zur Verfügung zu stellen und so der Lösung zum produktnahen Status zu verhelfen, kann sich jederzeit direkt beim Projektverantwortlichen Johannes Stoll melden, der die Gruppe Roboterprozesse und Kinematiken am Fraunhofer IPA leitet.
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Mehr zum Thema Industrie 4.0








{kind=link}