

Firmen im Artikel:
In klassischen Bearbeitungslinien erfolgt die Zuführung von Rohteilen heute oft noch manuell, was Einfluss auf die Produktivität der Fertigungslinie hat“, sagt Dirk Hablick, Leiter Vertrieb & Projektierung bei der DVS-Tochter rbc Fördertechnik. Um also einen kontinuierlichen Nachschub an Rohteilen zu gewährleisten, ist hoher personeller Aufwand erforderlich. „Durch unterschiedliche Behältergeometrien gibt es oft keine definierte Bauteillage und damit kaum automatisierungsgerechte Bedingungen“, sagt Hablick.
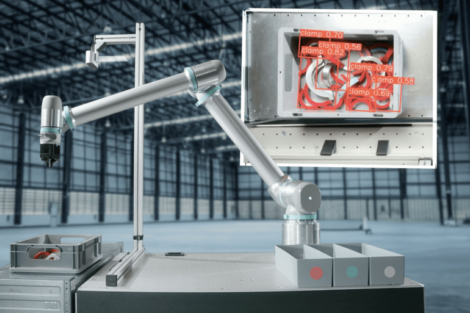
Diesen Herausforderungen hat sich rbc gestellt und ein Robotersystem für die Zuführung von rotationssymmetrischen oder kubischen Werkstücken entwickelt, mit dem Paletten oder Behälter automatisch ausgeräumt werden können. Das Herzstück ist das 3D-Visionsystem rbc-visio, welches stets die aktuelle Lage der Bauteile im Behälter ermittelt. Der Roboter führt vor jedem Griff in die Kiste einen Szenescan durch. Hablick: „So ist immer die aktuelle Teilelage der Ausgangspunkt für den nächsten Roboterzugriff.“
Verschiedene Ausräumstrategien
Die Methodik der Bauteilentnahme aus dem Behälter erfolgt nach unterschiedlichen Kriterien. So werden Bauteile mit Lage am Kistenrand anders abgegriffen als Bauteile, die sich in der Mitte des Behälters befinden. Das 3D-Visionsystem ist dabei stationär oder robotergeführt und kann anwendungsspezifisch zusammengestellt werden. Bei Ringen mit einem Gewicht von rund 20 kg beispielsweise, werden Toleranzen von bis zu +/- 2 mm ohne Einbußen an die Prozesssicherheit akzeptiert. Bei kleineren und komplexeren Geometrien wird dann für höhere Genauigkeit mit geänderter Sensorik und geringerem Scanabstand gearbeitet.
„Im Wesentlichen wenden wir Lasertriangulations- oder Lichtlaufzeitmessverfahren an“, sagt Hablick. Bei der Lasertriangulation wird eine Laserlichtlinie ausgesendet. Dabei spielt die Oberflächenbeschaffenheit des Bauteils eine entscheidende Rolle, denn Reflexionen bei glänzenden Oberflächen führen zu schlechteren Erkennungsraten. Das Lichtlaufzeitmessverfahren, beim dem ein Laserpuls mit aufmodulierter Frequenz verwendet wird, liefert stabilere, jedoch etwas unpräziseren Daten, die für viele Anwendungen jedoch noch ausreichend genau sind. „Je nach Auflösung der Sensorik und Abstand zum Objekt erzielt man damit Genauigkeiten von bis zu 0,1mm“, so Hablick.
Beim rbc-System für die Zuführung erfolgt die Auswertung der Daten bauteilspezifisch: Die 3D-Punktewolke wird nach einem definierten Algorithmus auf Linien oder Kreise untersucht und ausgewertet. „Die Gesamtgeometrie des Bauteils spielt bei dieser Art der Auswertung nur bedingt eine Rolle. So ist es z. B. möglich, partielle Merkmale zu scannen und nur diese auszuwerten.“ Das hat enorme Vorteile bezüglich einer rationellen Datenerfassung und -verarbeitung mit deutlichem Zeitvorteil. Die Auswertezeiten liegen meist bei rund einer Sekunde. Ein weiterer Vorteil des Systems ist, dass mehrere Sensoren mit nur einem PC ausgewertet werden können. Hablick: „Beispielsweise kann zunächst die Bauteillage im Behälter erfasst werden und anschließend partiell ein Geometriebereich, zur zusätzlichen Prüfung eines Merkmals.“
Das von rbc integrierte Robotersystem verfügt meist über einen pneumatischen Greifer und ist somit in der Lage, mehrere bereitgestellte Paletten zu scannen und zu leeren. Die Umrüstung auf andere Bauteile erfolgt per Knopfdruck, falls das Greifsystem für verschiedene Bauteilgeometrien ausgelegt ist. Hablick: „Bei Ringen z. B. ist dies sehr einfach und optimal zu realisieren, da diese eine simple Bauteilgeometrie mitbringen.“
rbc Fördertechnik GmbH
Dieselstraße 5
65520 Bad Camberg







{kind=link}