

Firmen im Artikel:
In der Produktion des Hausgeräteherstellers Miele im Werk Euskirchen führt ein Kuka-Roboter KR20 kameragestützt Bauteile dem Montageprozess zu. „Es war der explizite Wunsch von Miele, eine individuelle Handling-Applikation zu realisieren, die einfach und schnell auf unterschiedliche Bauteile und Montageprozesse umgestellt werden kann“, sagt Michael Miessen, verantwortlich für das technologische Konzept der Anlage bei Heinen Automation, die das Projekt gemeinsam mit ID Ingenieure & Dienstleistungen realisiert hat.
Insbesondere unter ergonomischen Gesichtspunkten war die bisherige manuelle Tätigkeit nicht mehr zeitgemäß. „Dazu kommt, dass die Taktzeiten erhöht werden sollten. Um Platz und Kosten zu sparen sowie die nötige Flexibilität gewährleisten zu können, wurde auf eine aufwendige Zellenkonstruktion verzichtet“, benennt ID-Geschäftsführer Michael Gottschalk die Punkte, die für eine Roboterlösung und gegen ein Linearportal sprachen.
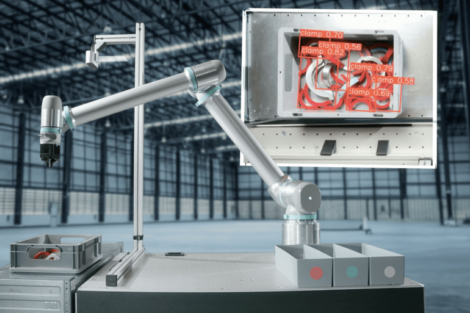
Im Mittelpunkt der Anlage steht daher nun ein KR20-Roboter. Das Besondere: Er ist am Greifer mit einer Kamera ausgestattet. Diese prüft sowohl die Menge der zu bearbeitenden Bauteile sowie deren exakte Position und erkennt Fehler, die durch den Transport oder durch menschliche Eingriffe entstanden sind. Damit ist der Roboter äußerst flexibel und verfügt über einen hohen Grad an Autonomie.
Teile autonom aufnehmen und ablegen
„Die Aufgabe des Roboters besteht darin, teilgeordnete Statoren automatisiert dem Montageprozess zuzuführen“, erläutert Miessen. Die unbeweglichen Motorenteile sind Teil des Antriebsmotors von Haushaltswäschetrocknern. Im ersten Produktionsschritt liefert ein Mitarbeiter die Statoren auf Paletten mit Kleinladungsträgern (KLT) auf einem Hubwagen an und legt sie auf dem Aufnahmerollgang ab.
Nachdem die Palette in den Arbeitsbereich des Roboters zugeführt wurde, fährt der KR20 darüber. Die Kamera am Mehrfachgreifer prüft die Befüllung der Kleinladungsträger. Anschließend bewegt sich der Roboter über den ersten Stator und prüft dessen genaue Positionierung, da die Bauteile aufgrund von Erschütterungen beim Transport oder durch Verschleiß des KLT mehrere Zentimeter abweichen können.
Mithilfe der Kamera können die Abweichungen erkannt und die Statoren mit dem Robotergreifer aufgenommen werden. Anschließend legt der Roboter das Bauteil in einer Wendestation ab. Dort wird dessen exakte horizontale Lage in der Ausgangsposition und nach einer 180°-Drehung bestimmt, um eventuelle Unebenheiten im Hallenboden auszugleichen.
An diesem Punkt endet die Arbeit des KR20. Die weitere Bearbeitung erfolgt durch ein Handling-Portal. Der Roboter leert währenddessen weiter die Kleinladungsträger. Anschließend stapelt der Roboter diese auf einer Palette auf dem Entnahmerollgang.
Flexibles Anlagendesign
Gottschalk freut sich über ein wirtschaftliches und flexibles Anlagendesign. „Vor allem, dass der Roboter in der Lage ist, mit verschiedenen Statoren aus einem Verpackungsbehälter umzugehen, ist ein großes Plus an Flexibilität.“ Die Anforderungen an den Roboter sind hoch, schließlich muss er an 220 Tagen im Jahr im Zweischichtbetrieb zuverlässig Statoren anliefern.
Die Verfügbarkeit sollte laut Miele 95 % betragen. Zudem sollte eine Autonomiezeit von 104 Minuten gewährleistet sein: Das entspricht bei drei vollbeladenen Paletten mit je 160 Statoren einer Taktzeit von 13 Sekunden. Die Anlage ist seit Anfang März 2018 in Betrieb. „Wir freuen uns, dass die Umsetzung so reibungslos geklappt hat. Bislang erfüllt die Anlage zu 100 Prozent unsere Erwartungen“, sagt Jürgen Zdunek, Fertigungsleiter in Euskirchen.
Kuka AG








{kind=link}