


Wo steht die MRK heute?
Pratter: Das Thema MRK hat sich gewandelt. Zu Beginn war der Wunsch groß, einen kollaborativen Roboter im Unternehmen zu haben. Es ging darum, Erfahrungen zu sammeln. Heute steht die Wirtschaftlichkeit des Einsatzes eines kollaborativen Roboters mehr im Vordergrund.
Ist die MRK also nach dem großen Hype nun gerade im „Tal der Enttäuschung“?
Pratter: So würde ich das nicht sehen. Aber die Unternehmen haben nun Erfahrungen gesammelt und gehen bewusster und zielgerichteter vor; beispielsweise mit welcher der vier Methoden der MRK die Applikation umgesetzt wird (s. Kasten).
Es gab ja gerade in der Automobilindustrie einige Leuchtturmprojekte: Was waren die wichtigsten Erkenntnisse?
Pratter: Die wesentliche Erkenntnis ist, dass gerade Applikationen in der Methode 4, also mit Kraft- und Leistungsbegrenzung, relativ langsam arbeiten. Eine Kombination mit anderen Methoden, wie etwa Methode 3, der Geschwindkeits- und Abstandsüberwachung, ist die bessere Wahl. Besonders wenn Mensch und Roboter nicht ununterbrochen eng zusammenarbeiten müssen. So lassen sich deutlich höhere Taktzeiten realisieren.
Gibt es bei Anwendern verbreitete Denkfehler oder falsche Erwartungen? Etwa, dass jede Anwendung kollaborativ sein kann?
Pratter: Nun, es muss prinzipiell klar sein, dass MRK nicht überall Sinn macht. Je schneller eine Applikation sein muss und je „gefährlicher“, sprich spitzer oder scharfkantiger die Konturen von Werkstück oder Werkzeug sind, desto herausfordernder wird es. Auch der Wunsch, dass durch MRK-Anwendungen Platz gespart wird, weil ja kein Zaun mehr notwendig ist, erfüllt sich leider nicht immer. Denn wenn man Sensoren zur Überwachung einsetzt, muss der Abstand zwischen Sensor und Roboter groß genug sein, um Roboter im Gefahrenfall stilllegen zu können. Dadurch übersteigt der Platzbedarf oft den traditioneller Roboterzellen. Die Kosten für die Umhausungen fallen allerdings weg.
Bei welchen Applikationen ist eine Mensch-Roboter-Kollaboration sinnvoll?
Pratter: MRK macht insbesondere dann Sinn, wenn ich Arbeitsplätze mit Blick auf die Ergonomie verbessern will. Seien es große Traglasten, die sonst der Mensch heben müsste, schlecht erreichbare Arbeitspositionen beispielsweise in der Montage oder aber monotone Arbeiten. Überall dort ist der Roboter eine gute Hilfe und somit ein gefragter Kollege. Das ist häufig das Hauptkriterium, MRK einzusetzen. Deshalb werden MRK-Roboter in bestehende Linien integriert, um den Menschen zu entlasten.
Was raten Sie Unternehmen, die in die MRK einsteigen wollen? Wo und wie beginnen?
Pratter: Ich rate zu einer gesamtheitlichen Betrachtung der MRK-Anwendung, und zwar von Beginn an. Denn das Design der Applikation hat sehr hohen Einfluss auf die Sicherheit. Wer sich gleich zu Beginn Gedanken zum Thema Safety macht, der muss später weniger integrieren und Nachbesserungen vornehmen. Da geht es beispielsweise darum, bei der Arbeitsplatzgestaltung mögliche Stolperstellen zu vermeiden oder um Aspekte wie die Form des Roboterwerkzeugs – möglichst rund und großflächig. Oder die Positionierung des Roboters: Könnte der Roboterarm nicht auch am Boden montiert sein, statt auf gefährlicherer Kopfhöhe zu verfahren? Im weiteren Verlauf kann auch eine gemeinsame Betrachtung der Bahnplanung Sinn machen.
Wie läuft denn so eine sicherheitstechnische Betrachtung ab?
Pratter: Zu Beginn geht es darum, die Vorstellungen des Betreibers kennenzulernen. Nach diesem Erstgespräch können wir dann bereits sagen, ob die geplante Applikation überhaupt MRK-tauglich ist, und bereits über die Wahl der Methoden sprechen. Dann folgen, wie bei jeder CE-Kennzeichnung, Risikobeurteilung und die Ausarbeitung des Sicherheitskonzepts. Der Hersteller baut darauf basierend seine Applikation auf und programmiert die Anwendung. Pilz übernimmt dann die Verifizierung und Validierung der Applikation, inklusive Kollisionsmessung bei Methode 4. Wenn gewünscht, kann Pilz außerdem als Bevollmächtigter die obligatorische Konformitätserklärung unterschreiben.
Eigentlich sollte MRK ja gerade kleinen und mittleren Unternehmen helfen. Aber ist für KMUs die Sicherheitszertifizierung nicht zu aufwendig?
Pratter: Hier darf ich beruhigen: Die sicherheitstechnische Betrachtung einer MRK-Applikation ist nicht wesentlich aufwendiger als eine herkömmliche CE-Kennzeichnung, wenn man, wie gesagt, frühzeitig die Sicherheitsaspekte berücksichtigt. Bei MRK-Methode 4 kommt bei der Validierung lediglich die Kollisionsmessung hinzu.
MRK sollte ja gerade bei kleinen Losgrößen helfen. Aber es muss doch wohl für jedes neue Werkstück/Teil die MRK-Applikation neu zertifiziert werden. Wie löst man dieses Dilemma?
Pratter: Auch hier möchte ich Entwarnung geben. Es muss nicht immer unbedingt neu zertifiziert werden. Im Grundsatz hängt es davon ab, ob es sich um eine wesentliche Veränderung handelt. Dafür müssen folgende Fragen beantwortet werden: Entsteht durch die Änderung eine neue Gefährdung oder erhöht sich die Gefährdung? Falls ja, kann die Gefährdung durch vorhandene oder neue einfache Schutzmaßnahmen beseitigt werden? Nur wenn das nicht der Fall ist, dann liegt eine wesentliche Änderung vor. Eventuell kann auch eine erneute Kollisionsmessung ausreichen.
Was sind die Stärken und was die Schwächen der MRK-Norm TS15066?
Pratter: Mit der ISO TS 15066 gab es erstmals ein Regelwerk mit einer detaillierten Beschreibung von verschiedenen MRK-Methoden und deren Anforderungen. Ganz neu war ja, dass bei Methode 4 auf einmal Berührungen zwischen Mensch und Maschine erlaubt waren. Insofern hat die ISO TS 15066 eine wichtige Lücke geschlossen. In der Kritik stehen immer wieder die Grenzwerte. Der Vorwurf lautet, dass diese so niedrig sind, dass eine Umsetzung nicht wirtschaftlich ist.
Müssen also die Grenzwerte der MRK-Norm ISO TS 15066 für Kräfte und Drücke überarbeitet werden?
Pratter: Fakt ist, dass die Roboternormen EN ISO 10218-1 und EN ISO 10218-2 momentan überarbeitet werden und der Inhalt der ISO TS 15066 überarbeitet und in EN ISO 10218-2 übernommen wird. 2021 sollen die beiden Normen voraussichtlich veröffentlicht werden. Pilz ist in diesen Normengremien aktiv. Auf Basis weiterer Studien werden die Grenzwerte für Kräfte und Drücke bei Kollisionen angepasst. Denkbar wäre auch, dass man anstatt von Schmerzschwellen in Richtung Verletzungsschwellen geht, zum Beispiel dann, wenn die Wahrscheinlichkeit einer Kollision gering ist. Das bedeutet, man würde die Grenzwerte in Abhängigkeit zur Kollisionswahrscheinlichkeit setzen. Wenn der Roboter mich also häufig trifft, dann muss der Wert niedriger sein. Natürlich immer unter der Prämisse, dass Verletzungen ausgeschlossen sein müssen.
Welche Schutztechnologien eignen sich für welche Anwendungsszenarien?
Pratter: Der Sensorik kommt bei der Umsetzung von sicheren Roboterapplikationen eine zentrale Rolle zu. Das reicht vom einfachen Sicherheitsschalter zur Überwachung von Positionen über Schutztürsysteme für trennende Schutzeinrichtungen bis hin zur Sensor-Technologie für die Flächen- und Raumüberwachung. Hier kommen dann optische Sensoren wie Lichtschranken, Scanner oder neuerdings auch sichere Radarsysteme zum Einsatz. Für die Methode 4 muss der Sensorik-Baukasten erweitert beziehungsweise optimiert werden, etwa um eine Kraftleistungsreduzierung im Roboterarm, eine taktile Haut oder auch Sensorik zur Kollisionsvermeidung am Roboterarm selbst.
Und welche Safety-Technologien werden die MRK beflügeln?
Pratter: Hier sehe ich Sicherheitstechnologien, die Kollisionen vermeiden, also die gemäß Methode 3 dynamisch die Geschwindigkeit des Roboters anpassen. Das können Nahfeldsensoren sein, die mit einem Laserscanner kombiniert werden, der das Feld um den Roboter selbst überwacht. Eine Voraussetzung dafür wäre, die Geschwindigkeit und die Richtung der Bewegung des Menschen zu erfassen.
Pilz GmbH & Co. KG
Felix-Wankel-Straße 2
73760 Ostfildern
Dienstleistungen und Schulungen für MRK
Jede Roboter-Applikation muss sicherheitstechnisch individuell betrachtet werden. Pilz unterstützt seine Kunden mit einem auf die einzelnen Lebensphasen eines Robotersystems abgestimmten Dienstleistungsangebot: von der Applikationsanalyse über die Risikobeurteilung gemäß EN ISO 12100 bis hin zur CE-Kennzeichnung.
Dabei erfüllen die Pilz-Sicherheitslösungen die Vorgaben der DIN EN ISO 10218–2 und der ISO/TS 15066. Ein Schulungsangebot zum Thema Robotersicherheit rundet das Serviceangebot ab.
Speziell für die Validierung von MRK-Applikationen nach Methode 4 der ISO TS 15066 bietet Pilz ein spezielles Kollisionsmess-Set PRMS an. Das Set wird im Rahmen der Validierung von Mensch-Roboter-Kollaborationen eingesetzt und dient der Erfassung von Kraft und Druck, die bei einer möglichen Kollision entstehen.
 Bilder: Pilz
Bilder: Pilz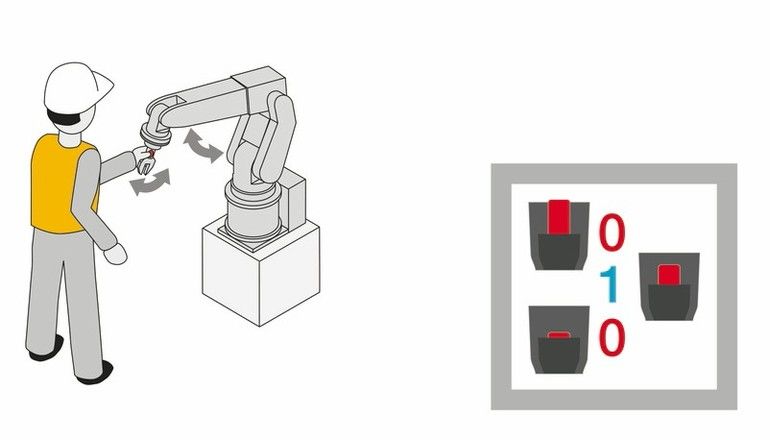 Bilder: Pilz
Bilder: Pilz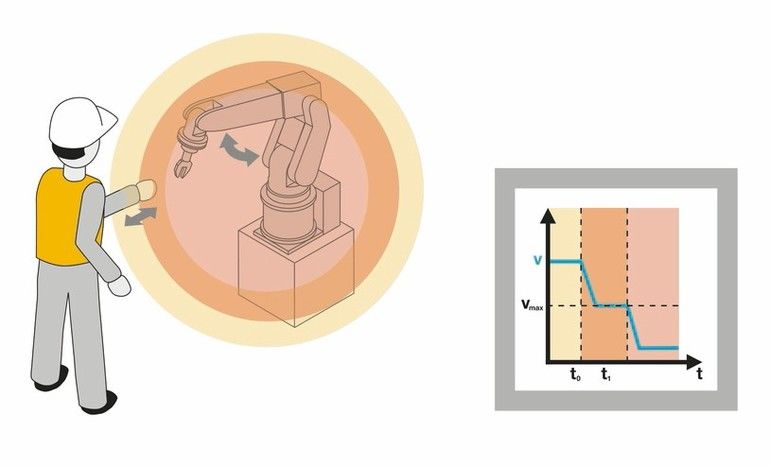 Bilder: Pilz
Bilder: Pilz Bilder: Pilz
Bilder: PilzDie vier Methoden der MRK
Die Mensch-Roboter-Kollaboration (MRK) stellt hohe Anforderungen an die Sicherheit, da sich Mensch und Roboter einen gemeinsamen Arbeitsraum ohne Schutzzaun teilen. Daher wurde zum Schutz des Werkers die Technische Spezifikation ISO/TS 15066 veröffentlicht. Darin sind vier Methoden für die Absicherung von Mensch-Roboter-Kollaborationen beschrieben:
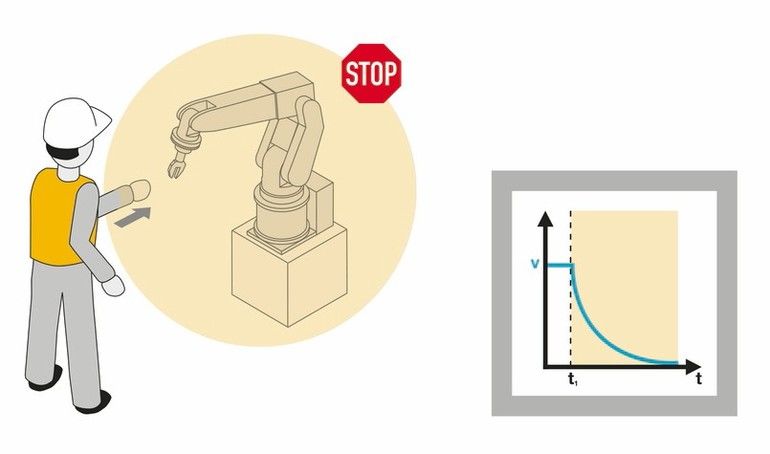
- Methode 1 – sicherheitsgerichteter Stopp: Bei Zutritt zum Kollaborationsraum befindet sich der Roboter im sicheren Betriebshalt. Bei Verlassen setzt der Roboter seine Bewegung durch Quittierung oder automatisch fort. Die Höhe der Geschwindigkeit wird anhand der Risikobeurteilung festgelegt.
- Methode 2 – Handführung: Der Mensch darf sich nur dem stillstehenden Roboter nähern. Bei Betätigung der Zustimmeinrichtung kann der Roboter mit sicher reduzierter Geschwindigkeit manuell geführt werden. Die Höhe der Geschwindigkeit leitet sich aus der Risikobeurteilung ab.
- Methode 3 – Geschwindigkeits- und Abstandsüberwachung: Nicht trennende Schutzeinrichtungen werden so eingesetzt, dass sich Personen jederzeit ohne Gefährdung dem Roboter nähern können. Dabei wird die Distanz zwischen Mensch und Roboter überwacht und die Geschwindigkeit entsprechend angepasst. Bevor eine Kollision entsteht, schaltet sich der Roboter ab.
- Methode 4 – Leistungs- und Kraftbegrenzung: Eine Kollision von Mensch und Roboter ist möglich – unter der Einhaltung der biomechanischen Grenzwerte, die die Kontaktkräfte zwischen Mensch und Roboter auf ein ungefährliches Maß begrenzen. Die ISO/TS 15066 legt hier die Schmerzschwellen für verschiedene Körperregionen fest.
Mehr zum Thema Robotik aus Odense










{kind=link}