

Das Technologiepaket LHRobotics.Vision umfasst neben der grafisch geführten, intuitiv bedienbaren Software ein projektorbasiertes 3D-Kamerasystem. Das Paket lässt sich in Anlagen sämtlicher Hersteller verwenden und ist damit attraktiv für Endanwender und Integratoren. Es ermöglicht eine objektorientierte Bilderkennung durch Auswertung einer 3D-Punktewolke. Die gewünschten Greifpunkte am Bauteil lassen sich einfach grafisch in der Software festlegen, das aufwendige Teachen des Roboters entfällt. Damit können die kollisionsfreie Bauteilentnahme und die Bahnplanung einfach konfiguriert werden.
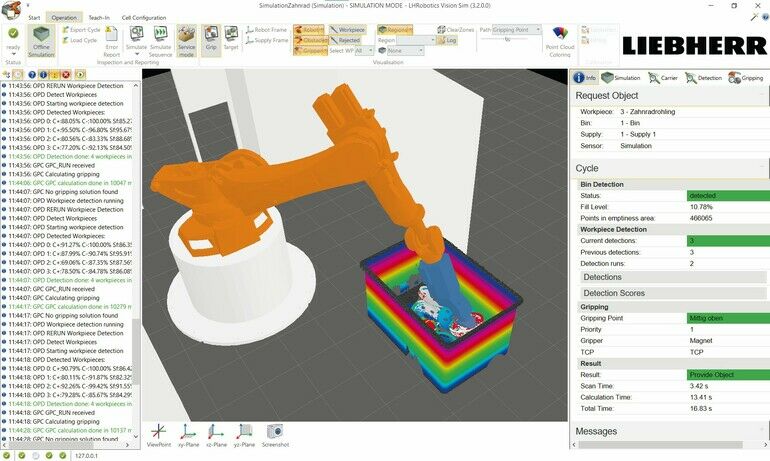
Ein besonderes Feature ist das optionale Simulationstool LHRobotics.Vision Sim. Mittels Physics Engine wird eine Kistenbefüllung simuliert, anschließend eine virtuelle Punktewolke erzeugt und ausgewertet. Nicht nur der Scan, auch die Entnahme wird vollständig simuliert inklusive aller Umgebungsparameter wie das Verhaken oder Wegrollen von Teilen. Damit kann der Anwender oder die Anwenderin rein virtuell die Greifergeometrie anpassen und Abläufe optimieren.
Bin Picking mit KI
Für die Implementierung von Bin Picking-Lösungen war bis dato meistens Unterstützung durch den Systemhersteller oder Integrator notwendig. Wie wäre es aber, wenn das System lernfähig wäre und die Parameter bei der Einstellung oder sogar im laufenden Betrieb selbstständig anpassen könnte?
In einem neuen Release der Software LHRobotics.Vison zündet Liebherr nun die nächste Stufe: Künstliche Intelligenz und maschinelles Lernen ermöglichen das automatische Einrüsten neuer Bauteile in den Bin Picking-Prozess – ein Quantensprung in dieser Technologie. Dabei berechnet das System auf Basis realer Scan-Daten die geometrischen Parameter der Bauteile und analysiert die Auflösung und das Rauschverhalten des Sensors. Anschließend werden aus diesen Scan-Daten Testmessungen generiert, mit deren Hilfe dann die optimalen Einstellparameter ermittelt werden. Das vereinfacht Prozesse und spart Zeit und Kosten. Indem das System sich beim Einrüsten mit jedem Scan selbst trainiert, schafft es die Grundlage für den nächsten Schritt: das maschinelle Lernen im laufenden Betrieb.









{kind=link}