Das komplett aufeinander abgestimmte intelligente Greif-Paket mit Hardware, Software und Service aus einer Hand ist offen für alle Roboter – und Schunk ist einziger Ansprechpartner für die gesamte Lösung.
Das Abgreifen zufällig angeordneter und nicht-lageorientierter Teile von einem Fließband, Rütteltisch, Tray, Bereitstellungstisch oder Ladungsträger ist ein häufiger Vorgang in vielen industriellen Fertigungsabläufen. Die automatisierte Handhabung mittels Roboter, Greifer und Visionsystem ist jedoch anspruchsvoll und erfordert Erfahrung in den Bereichen Bildverarbeitung, Beleuchtungs- und Prozesstechnik.
Einstieg in die automatisierte Handhabung erleichtert
Daher bietet Schunk hier nun mit dem 2D Grasping-Kit eine Komplettlösung an, die den Einstieg in die automatisierte Objekt-Handhabung wesentlich erleichtert. Anwender können das Plug-and-play-fähige, visionbasierte System unkompliziert integrieren, ohne Vorkenntnisse in der Programmierung oder Bildverarbeitung. Davon profitieren besonders Unternehmen, die mit der Automatisierung ihrer Fertigungsprozesse noch am Anfang stehen.
Herzstück ist Schunks KI-Software
Das 2D Grasping-Kit ist – nach den Applikations-Kits MTB für die einfache Teilautomatisierung der Be- und Entladung von Maschinen – ein weiteres Komplettpaket von Schunk. Denn das 2D Grasping-Kit vereint intelligente Objekterkennung und flexibles Greifen mit intuitiver Bedienbarkeit und ist an die jeweilige Kundenanforderung anpassbar. Herzstück ist die selbst entwickelte KI-Software, die ein Erkennen auch unter wechselnden Lichtverhältnissen zuverlässig gewährleistet.
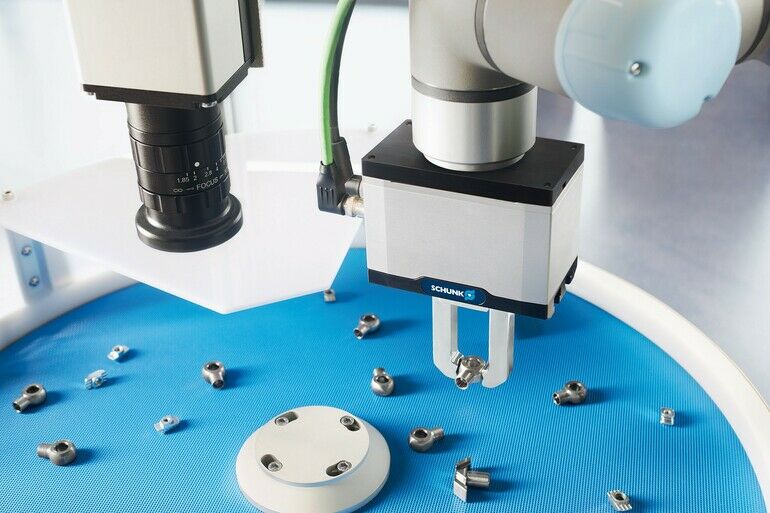
Die Automatisierungslösung für das Greifen und Ablegen nicht-lageorientierter Werkstücke besteht aus einem Kamerasystem samt Objektiv, einem applikationsspezifischen Greifsystem, einem Schunk eigenen Industrie-PC (SVC) sowie einem Plugin zur einfachen Einbindung in die Robotersteuerung.
Das Kamerasystem detektiert die Werkstücke auch bei schwierigen Lichtverhältnissen zuverlässig und berechnet mögliche Griffe samt Kollisionsprüfung. Die Werkstücke müssen nicht mehr vorab sortiert oder in Position gebracht werden; der Anwender kann seine bisherigen Prozesse beibehalten.
Bei der Werkstückdetektion wird mittels KI nach zuvor definierten Objekten gesucht. Die Software berechnet über die zuvor in der Software definierten Störkonturen der Finger und des Werkstücks, wie das Werkstück kollisionsfrei im definierten Workspace gegriffen werden kann. Nach der Erkennung werden kollisionsfreie Griffe und Anfahrpunkte sekundenschnell automatisch berechnet und an den Roboter übergeben.
Der Anwender kann das 2D Grasping-Kit mittels fertiger Softwarebausteine in verschiedene Roboter oder Cobots einbinden; Schunk liefert im Kit das passende Plug-In zum Roboter. Es lassen sich je nach Greifsituation passende Greifer für jeden Cobot-Typ kombinieren – elektrisch, magnetisch, adhäsiv oder pneumatisch. Mithilfe des Berechnungs- und Auslegungstools Greifen von Schunk und der realitätsnahen Validierung im Roboter-Applikationszentrum CoLab ist im Vorfeld der Applikation genau prüfbar, wie gut der ausgewählte Greifer die Werkstücke greifen kann.
Validierung der Anwendung im CoLab
Im CoLab, dem Schunk Roboter-Applikationszentrum, kann das 2D Grasping-Kit an der konkreten Anwendung umfänglich getestet und validiert werden. So lässt sich beispielsweise ermitteln, wie sicher die Werkstücke von der Kamera erkannt werden und ob die Aufnahme und Ablage der Werkstücke prozesssicher funktioniert. Zudem unterstützt Schunk den Kunden bei der Umsetzung oder dem Einlernen der ersten Werkstücke Unterstützung.
Schunk GmbH & Co. KG
Mehr zum Thema Robotik

Hier finden Sie mehr über:









{kind=link}