
Der Griff in die Kiste gehört zu den schwierigsten Disziplinen in der Automation. Das Einstellen der Parameter ist anspruchsvoll und erfordert viel Expertise. Denn der Bin-Picking-Roboter muss unterschiedliche, chaotisch angeordnete Objekte mit teils komplexen Geometrien erkennen, kollisionsfrei entnehmen, in eine orientierte Lage bringen und an die Maschine übergeben. Die Einrichtung des Zusammenspiels zwischen Bauteilen, Kiste und Greifer erfordert eine Menge Erfahrung und Know-how des Bedieners und des Integrators.
Wie aber wäre es, wenn das System lernfähig wäre und die Parameter bei der Einstellung oder sogar im laufenden Betrieb selbstständig anpassen könnte? Der Automationsspezialist Liebherr-Verzahntechnik aus Kempten arbeitet daher an einer Weiterentwicklung der eigenen Software LHRobotics.Vision und will mittels Künstlicher Intelligenz (KI) die Parametrierung für den Bediener erheblich vereinfachen. „Wir wollen Bin Picking für jedermann ermöglichen“, verspricht Jürgen Groß, Vertriebsleiter Flexible Fertigungs- und Automationssysteme bei Liebherr.
Paket auf Software und Kamera
Denn Liebherr stellt nicht nur komplette Roboterzellen mit integrierter Bin-Picking-Software her, sondern bietet die Software auch als eigenständiges Produkt an, das sich in Anlagen anderer Hersteller verwenden lässt. Das Technologiepaket LHRobotics.Vision umfasst neben der intuitiv bedienbaren Software auch ein projektorbasiertes 3D-Kamerasystem.
Auf Basis einer 3D-Stereo-Vision-Aufnahme wird eine Punktewolke erzeugt, die als Basis für die Bahnplanung der kollisionfreien Bauteilentnahme dient. Die Greifpunkte am Bauteil lassen sich einfach grafisch in der Software festlegen, das aufwendige Teachen des Roboters entfällt. Ein besonderes Feature ist das optionale Simulationstool LHRobotics.Vision Sim. Mittels Physics Engine wird eine Kistenbefüllung simuliert. Damit kann man rein virtuell die Greifergeometrie anpassen und Abläufe optimieren, um einen verbesserten Entleerungsgrad auch tiefer Kisten zu erzielen – ohne Risiko und ohne teure Investitionen.
KI hält Einzug ins System
Für September 2021 ist ein neues Release der Software LHRobotics.Vison geplant. Künstliche Intelligenz und maschinelles Lernen ermöglichen das automatische Einrüsten neuer Bauteile in den Bin Picking-Prozess. Dabei berechnet das System auf Basis realer Scan-Daten die geometrischen Parameter der Bauteile. Anschließend werden aus diesen Scan-Daten Testmessungen generiert, mit deren Hilfe dann die optimalen Einstellparameter ermittelt werden. Das vereinfacht Prozesse und spart Zeit und Kosten. Indem das System sich beim Einrüsten mit jedem Scan selbst trainiert, schafft es die Grundlage für den nächsten Schritt: das maschinelle Lernen im laufenden Betrieb.
„Zukünftig werden die komplexer werdenden Teilegeometrien und -beschaffenheiten das Bin Picking vor große Herausforderung stellen. Die KI ist eine Schlüsseltechnologie, ohne die diese Anforderungen kaum mehr zu bewältigen sein werden“, so Jürgen Groß. „Bei Liebherr sind wir vertraut mit der Anwenderseite und bringen unsere gesamte Prozesskompetenz ein. Damit sind wir ein echter Partner für die Industrie und auch für künftige Entwicklungen gut gerüstet.“
Vision für E-Mobilität
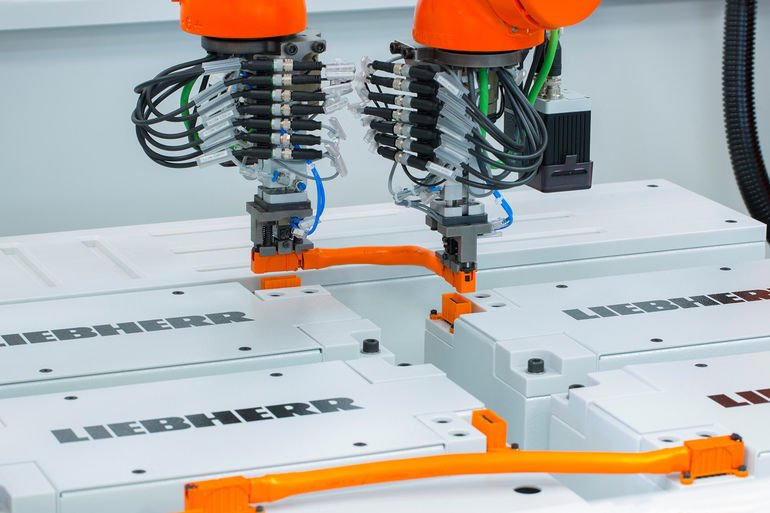
Aber nicht nur beim Bin Picking setzt Liebherr auf Vision-Systeme mit Künstlicher Intelligenz, sondern auch beim automatischen Stecken von biegeschlaffen Kabelverbindungen – beispielsweise den Modulverbindern der Batteriepacks von E-Fahrzeugen. Bislang können solche Steckverbindungen für das elektrische Kontaktieren der Module im Batteriepack nur manuell montiert werden.
Liebherr hat gemeinsam mit der Kostal Kontakt Systeme eine innovative Lösung für die Automation des Steckprozesses mit diesen biegeschlaffen Teilen entwickelt: Zwei kooperierende Roboter greifen dabei jeweils ein Ende des Kabels und führen den Steckprozess synchron mit zeitlich und geometrisch abgestimmten Bewegungen durch. Mit einer 2D-Kamera erkennt der Roboter die reale Position der Steckplätze. Auf diese Weise können Positionierungstoleranzen kompensiert werden. Der eigentliche, mechanische Steckvorgang erfolgt über einen pneumatischen Zylinder.
Dabei begrenzt ein Federpaket die Kraftübertragung auf Modul, Stecker und die Steckerverriegelung zur Positionssicherung (CPA). Abschließend erfolgt die prozesssichere Überwachung durch einen Endlagensensor. Auch das Verlegen der Kabel in der gewünschten Position und Geometrie kann Liebherr mit entsprechenden Kabelbiegegreifern lösen.
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
www.liebherr.com/verzahntechnik
Mehr zum Thema Robotik










{kind=link}