



Das Aufnehmen und Bewegen von Objekten ist eine der wichtigsten Aufgaben in der Robotik. Greifer für Roboter stellen hierfür eine Kernkomponente dar. Je nach zu handhabendem Werkstück, der Aufgabenstellung und der Arbeitsumgebung gibt es verschiedenste Ausführungen. Welche das sind, wer sie herstellt, wofür sie sich eignen und wie Anwender den richtigen Greifer finden, erfahren Sie in dieser Übersicht.
- Was sind Robotergreifer?
- Wie sind Greifer aufgebaut?
- Welche Arten von Greifern gibt es?
- Für welche Anwendungen eignen sich Robotergreifer?
- Wer sind die Hersteller von Greifern für die Robotik?
- Die Auswahl des richtigen Greifers
Das Ausräumen der Spülmaschine, das Anmalen von Eiern an Ostern oder das Werfen eines Balls – das Handhaben von Gegenständen ist für die meisten Menschen etwas ganz Selbstverständliches. Die große Komplexität, die dennoch dahintersteckt, zeigt sich beim Versuch ähnliche Bewegungsmuster auf Maschinen in der verarbeitenden Industrie zu übertragen. Während unser Hirn ohne spürbaren Aufwand Arme und Hände präzise steuert und sich mittels unserer Augen ein Bild von der Umgebung macht, benötigt ein Roboter eine meist zeit- und kostenintensive Programmierung und wichtige Komponenten, um Objekte erkennen, greifen und bewegen zu können. Die wichtigste dieser Komponenten ist der Greifer des Roboters.
Was sind Robotergreifer?
Greifer gehören zu der Gruppe der Endeffektoren (engl. End of Arm Tools, EOAT). Sie sind das wirkende Glied am Ende einer kinematischen Kette und bilden die Schnittstelle zwischen Werkstück und Industrieroboter oder Cobot.

Die Endeffektoren werden in zwei Kategorien unterteilt: Werkstück– oder Werkzeughandhabung. Die Werkstückhandhabung beschreibt die Greifer und Systeme, die sich mit der Manipulation des Werkstücks befassen – greifen, halten und bewegen. Sie arbeiten entweder mechanisch, vakuum-basiert, magnetisch oder adhäsiv. Bei den Endeffektoren zur Werkzughandhabung führt der Roboter ein Werkzeug oder Prüfmittel, um Fertigungsaufgaben durchzuführen. Beispiele für diese End of Arm Tools sind Werkzeuge wie Bohrspindeln, Exzenterschleifer, Schraubendreher, Schweißgeräte, Entgratsysteme oder Lackierpistolen, und Prüfmittel wie Kameras, Prüfsonden oder Scanner.
Mit dem Aufkommen der Digitalisierung und Schlagworten wie „Internet der Dinge“ und „Industrie 4.0“ sind Automatisierungskomponenten wie Roboter sowie auch Endeffektoren und insbesondere Greifer immer mehr zu Netzwerkteilnehmern der gesamten Fertigungsstruktur geworden. Diese tauschen untereinander Informationen aus, um eine Produktivitätssteigerung beispielsweise durch das Verhindern von Ausfallzeiten oder die Echtzeitprüfung von Bauteilen zu erreichen. Dem Endeffektor kommt hier eine besondere Rolle zu, da er direkten Kontakt zum Bauteil hat und so relevante Daten sammeln und weitergeben kann.
Wie sind Greifer aufgebaut?
Der Aufbau von Greifersystemen unterscheidet sich aufgrund der unterschiedlichen Wirkprinzipien stark. Grundkörper und Wirkelemente sind trotz aller Unterschiede Bestandteile eines jeden Greifers. Der Grundkörper stellt die sichere Verbindung zum Roboter her, die Wirkelemente die Verbindung zum Werkstück. Darüber hinaus besitzen Greifer in der Regel eine Energieversorgung, welche die Bereitstellung der Greifkraft sicherstellt.
Die Greifelemente lassen sich aufgrund ihrer physikalischen Wirkprinzipen in folgende Gruppen einteilen:
- Kraftschluss: Reibkräfte, Unterdruckkräfte, Magnetkräfte, elektrostatische Kräfte
- Stoffschluss: Molekularkräfte
- Formschluss: Paaren von Formelementen, Oberflächenverhakung
Je nach Greifart werden im Grundkörper Antriebskomponenten und Kinematik integriert. Immer häufiger werden auch Elektronik und Sensorik in den Greifern verbaut, um die Qualitätskontrolle in Echtzeit und eine Steigerung der Prozesssicherheit zu ermöglichen. Um die auftretenden Kräfte und Momente zwischen Roboter und Greifer zu übertragen, benötigt das System außerdem einen dafür ausgelegten Flansch. Dem Trend der steigenden Flexibilität folgend, ist hierbei auch das schnelle und unkomplizierte Wechseln der Greifer ein wichtiges Thema.
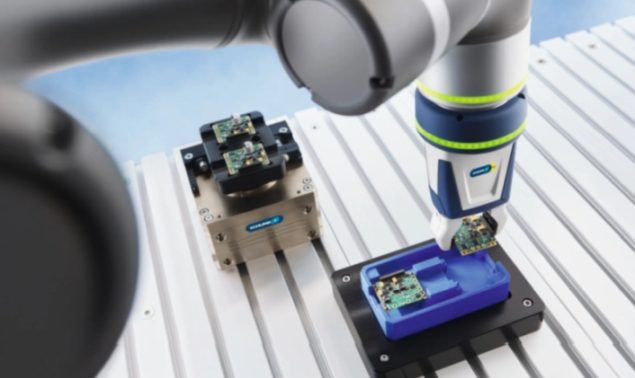
Eine weitere Möglichkeit, die automatisierten Systeme flexibler zu gestalten, sind Schnellwechselsysteme für Greifelemente. So kann beispielsweise auf Knopfdruck der Aufsatz mechanisch entriegelt und ausgetauscht werden. Das senkt Umrüstzeiten und steigert die Produktivität der gesamten Anlage. Ein anderer Ansatz sind Kooperationen zwischen Greifer- und Roboterherstellern, um so ein schnelles Auswechseln der Greifer im Sinne von „Plug-and-play“ anbieten zu können. Beispiele hierfür sind die Match-Plattform der Handling-Spezialisten Zimmer und Schmalz sowie Yaskawas Smart Series.

Welche Arten von Greifern gibt es?
Die verschiedenen Greifer unterscheiden sich insbesondere darin, wie sie die Greifkraft am Handhabungsobjekt aufbringen: mechanisch, vakuum-basiert, magnetisch oder adhäsiv.
- Mechanische Greifer kommen in der Robotik am häufigsten zum Einsatz. In den meisten Fällen werden sie pneumatisch betrieben. Diese Antriebsart bietet genaue Bewegungen bei vergleichsweise niedrigen Kosten. Aber auch der Bedarf an elektrischen Greifern wächst, da sie sowohl präzise als auch sehr dynamisch sind. Für große Nutzlasten kommen hin und wieder auch hydraulische Systeme zum Einsatz. Beispiele für mechanische Greifer sind Parallel- und Winkelgreifer.
- Vakuum-basierte Sauggreifer erlauben ein besonders schonendes Handling der Werkstücke, einen kompakten und platzsparenden Aufbau des Systems sowie das Greifen von Oben – was das lückenlose Positionieren nebeneinander ermöglicht. Sie halten das zu handhabende Teil aufgrund des Vakuums in ihren Saugnäpfen. Die Objekte benötigen eine glatte Oberfläche, damit eine Luftabsaugung möglich ist und der Greifer daran haftet.
- Bei Magnetgreifern wird zwischen Permanent- und Elektromagnetgreifer unterschieden. Bei den Permanentmagnetgreifern wird die Greifkraft durch einen Dauermagneten bereitgestellt, weshalb die Werkstücke dem Greifer „abgenommen“ werden müssen. Der elektromagnetische Greifer wird mit elektrischem Gleichstrom versorgt, der für das erforderliche Magnetfeld sorgt. Die Aufnahme und Abgabe der ferromagnetischen Werkstücke erfolgen über das Ein- und Abschalten der Energieversorgung.
- Zum sensiblen und rückstandlosen Aufnehmen werden auch adhäsive Greifer eingesetzt. Die Technologie basiert auf dem Prinzip der Adhäsion und nutzt intermolekular wirkende Van-der-Waals-Kräfte fürs Handling. Die Greifoberfläche der Greifer ist mit Millionen mikroskopisch kleiner Härchen versehen, die beim Druck auf eine Oberfläche eine Scherhaftung entwickeln. Da die bauteilschonende Hafttechnologie weder Druckluft, Vakuum oder Strom benötigt, soll der Aufwand für die Inbetriebnahme laut der Hersteller vergleichsweise gering sein.
Für welche Anwendungen eignen sich Robotergreifer?
Ein typischen Aufgabengebiet für Roboter auf Greifer sind Pick-and-place-Anwendungen. Darunter zählen insbesondere:
- das Be- und Entladen von Maschinen,
- das (De-)Palettieren sowie
- das Kommissionieren und Verpacken von Objekten
Je nach Anwendung und Werkstück, kommen dabei verschiedene Greifer infrage: Pneumatik-Greifer eignen sich für das schnelle Handling in Anlagen und elektrische Servogreifer ermöglichen das hochsensible Greifen, z.B. bei der Prüfung von Haarpflegeprodukten. Kleine Vakuumgreifer bspw. eignen sich für das behutsame Platzieren von Pralinen in Verpackungen, während große Sauggreifer bei Kartons im Wareneingang oder -ausgang Verwendung finden. 2-Finger-Greifer beweisen ihre Fähigkeiten unter anderem beim Kabelstecken.
Wer sind die Hersteller von Greifern für die Robotik?
Je nach Anwendungsfall und Wirkungsprinzp gibt es unterschiedlichste Greifertypen. Dementsprechend viele Hersteller von Endeffektoren gibt es auch. Im folgenden werden einige von ihnen vorgestellt.
Schunk: Ganze Palette an Robotergreifern
Der Greifer- und Spanntechnikspezialist Schunk GmbH & Co. KG bietet laut eigenen Angaben mit mehr als 4000 Standardkomponenten eines der umfassendsten Produktprogramme an pneumatischen, elektrischen und hydraulischen Greifern ab Lager. Mit dem Co-act EGP-C-Greifer bietet das Unternehmen unter anderem einen sicheren Industriegreifer, der von der DGUV für den kollaborierenden Betrieb zertifiziert und zugelassen ist. Darüber hinaus bieten die Lauffener auch Endeffektoren für die Bearbeitung von Werkstücken.
Zimmer: Greifer für kollaborative Anwendungen
Die Zimmer Group ist weltweit agierender Hersteller von pneumatischen und elektrischen Handhabungskomponenten und Systemen. Mechatronische Greifer sind seit 1992 ein fester Bestandteil des Zimmer-Programms, denn sie kombinieren hohe Leistung mit einfacher Bedienung. Ein Highlight ist die Hybridgreifer-Serie 5000, sie vereint Merkmale aus Pneumatik und Elektrik. Darüber hinaus bietet das Unternehmen verschiedene Greifer für kooperative und kollaborative Anwendungen.
Schmalz: Spezialist für das Vakuum-Handling
Für automatisierte Prozesse in den verschiedensten Branchen und den sogenannten „Griff in die Kiste“ beim Bin-Picking, bietet die J. Schmalz GmbH vakuum-basierte Greifsysteme, die als End-of-Arm-Tooling an Robotern und Portalen zum Einsatz kommen. Die Greifer und Vakuumerzeuger für alle gängigen Cobots und Leichtbauroboter werden individuell für den Anwendungsfall ausgelegt.
Onrobot: Innoavtive Cobot-Greifer aus Dänemark

Der Cobot-Greifspezialist Onrobot A/S ist im Juni 2018 aus drei Unternehmen entstanden: On Robot (Dänemark), Perception Robotics (USA) und Optoforce (Ungarn). Ziel ist es, laut Enrico Krog Iversen, mit Onrobot ein One-Stop-Shop für kollaborative Roboter-Applikationen aufzubauen. Neben verschiedenen Greifern, darunter auch der Gecko-Greifer mit adhäsiver Hafttechnologie, bietet das Unternehmen verschiedene End of arm Tools für die Werkstückbearbeitung.
Gimatic: Greifer in der Kunststoff- und Medizintechnik
Der Handlingspezialist Gimatic S.r.l. aus Italien hat sich in den letzten Jahren vom reinen Komponentenlieferanten zum Systemlieferanten mit Spezialisierung auf mechatronische Greifer entwickelt. Die Kunststoffindustrie und Medizintechnik sind wichtige Märkte für das Unternehmen. Der deutsche Gimatic-Vertrieb in Hechingen hat inzwischen eine umfangreiche Kompetenz im Systembau für Greifersysteme für die zunehmende Automatisierung in Richtung Industrie 4.0 aufgebaut.
Fipa: Fokus auf die Kunststoffindustrie
Die Fipa GmbH bietet mit ihrem Portfolio einen modular aufgebauten Greiferbaukasten: Greifzangen mit und ohne Hub, Greifzangen für die Direktmontage oder mit integrierter Sensorabfrage und Greiffinger zum Hintergreifen von Werkstücken. Eine Vielzahl an unterschiedlichen Befestigungselementen und Schnellwechselsystemen runden das Portfolio ab. Viele Produkte sind speziell für Anwendungen in der Kunststoffindustrie optimiert.
Piab: Vakuum-Greifer mit Coax-Technologie

Die schwedische Piab AB strebt eine Entwicklung von vakuum-basierten Produkten an, die den Energieverbrauch und Umweltauswirkungen reduzieren. Die Kerntechnologien des Unternehmens sind: die Erzeugung von Vakuum auf der Basis von Druckluft (Coax-Technologie), das Handling von Teilen mit Sauggreifern und die Förderung von Pulver und Schüttgut mit Vakuum. Inzwischen hat sich das Unternehmen mit Know-how im Bereich mechanischer Greifer verstärkt.
Weiss Robotics: Smarte Greifmodule für die Fertigung
Die smarten Greifmodule der Weiss Robotics GmbH & Co. KG mit integrierter Werkstückerkennung und Griffüberwachung soll den Greifprozess optimieren und die Produktivität in der Fertigung steigern. Neben Greifmodulen bietet der Hersteller auch Systemlösungen zur einfachen Integration der Endeffektoren in Cobot- oder industrielle Roboteranwendungen und Zubehör.
Robotiq: Kanadische Greifer für kollaborative Anwendungen
Die Robotiq Inc. hat sich auf kollaborative Roboteranwendungen spezialisiert. Zum Produktsortiment gehören Zwei- und Drei-Finger-Greifer sowie Vakuumgreifer. Das kanadische Unternehmen entwickelt darüber hinaus kollaborative Systemlösungen – zum Beispiel für das Palettieren und Schrauben.
Die Auswahl des richtigen Greifers
Bei der Konzeption einer Automatisierungslösung sollte zuerst die Aufgabe beschrieben und die grundsätzliche Machbarkeit geprüft werden. Eignen sich Werkstück und Aufgabenstellung für eine Vollautomatisierung oder Mensch-Roboter-Kollaboration? Ist dieser Punkt abgehakt, geht es um die Auswahl des Roboters, bzw. Cobots. Hierfür wird das Grundsystem inklusive der benötigten Peripherie definiert und dessen Ansteuerung sichergestellt.
Im Anschluss daran, steht die Auswahl des richtigen Greifers im Fokus. Je nach Werkstück, Aufgabe und Umwelteinflüssen stehen ganz unterschiedliche Merkmale zur Verfügung:
- das zu handhabende Objekt (Masse, Werkstoff, Abmessungen, Griffpunkte, usw.),
- die Handhabungsaufgabe und daraus resultierende Anforderungen an den Greifer (Greifkraft, Positioniergenauigkeit, Beschleunigung, Nutzlast, usw.),
- die Anlage und Peripherie (Zykluszeit, Bewegungsverlauf, Prozesskräfte, Zugänglichkeit, Greifermagazin, usw.),
- sowie verschiedene Umwelteinflüsse (Feuchtigkeit, Temperatur, Reinraumklasse, Strahlung, usw.).
- Da sich das Gewicht des Greifers direkt auf die Nutzlast des Roboters auswirkt, empfiehlt es sich außerdem einen möglichst leichten Greifer zu verwenden.
Als Daumenregel gilt: Je schneller und einfacher sich eine Applikation in Betrieb nehmen lässt, desto besser. Eine einfache Handhabung stellt sicher, dass sich die Applikation bei Bedarf flexibel für neue Aufgaben umrüsten lässt, und die Prozesse weiterlaufen können.
Quellenverzeichnis:
- Wolf, Andreas/Schunk, Henrik (2016): Greifer in Bewegung – Faszination der Automatisierung von Handhabungsaufgaben, München, Deutschland: Hanser. (https://www.hanser-kundencenter.de/fachbuch/artikel/9783446442412)
- Schunk: https://schunk.com
- Zimmer Group: https://www.zimmer-group.com
- Schmalz: https://www.schmalz.com
- Onrobot: https://onrobot.com
- Gimatic: https://www.gimatic.com
- Fipa Piab: https://www.fipa.com
- Weiss Robotics: https://weiss-robotics.com
- Robotiq: https://robotiq.com
Mehr zum Thema Robotik









{kind=link}