
Cobots sind in aller Munde, denn die Mensch-Roboter-Kollaboration (MRK) gilt als nächstes großes Ding der Robotik. MRK soll der Fabrikautomation neue Möglichkeiten eröffnen, denn idealerweise sollen sich damit die Vorteile des Menschen (Flexibilität, Urteilsvermögen, Kreativität, Erfahrung, Intuition und Überblick) und die Vorteile des Roboters (Ausdauer, Präzision und Stärke) verbinden lassen.
Soweit die Vision. Allerdings zeigt sich, dass es in der Praxis mit der Kollaboration oft gar nicht so weit her ist. „Wir haben bereits sehr viele Anwendungen im Markt – echte kollaborative Anwendungen sind darunter aber nur 10 bis 20 Prozent“, so Helmut Schmid, General Manager Western Europe des Cobot-Herstellers Universal Robots. Das bestätigt Professor Wilhelm Bauer, Leiter des Fraunhofer IAO: „Das zu Beginn der MRK-Diskussion oft dominierende Bild, dass Mensch und Roboter eng Hand in Hand arbeiten, ist nur in ganz wenigen Fällen sinnvoll.“
Das eine Problem ist die Taktzeit, denn ein kollaborativer Roboter darf nicht zu schnell fahren, um den Menschen in seiner Nähe nicht zu gefährden. „Das führt zu geringen Zykluszeiten und zerstört oft die Amortisation eines Projektes“, berichtet Dr. Michael Klos, General Manager, Business Development der Robotics Division bei Yaskawa.
Das andere Problem sind die Kosten: Für jeden kollaborativen Arbeitsplatz muss eine individuelle Sicherheitsbegutachtung vorgenommen werden, oft mit aufwendigen Kollisionskraft-Messungen. Kommen dann noch Mehrkosten für kollaborative Greifer und die Sicherheitstechnik hinzu, ist das Geld, das man eigentlich am Schutzzaun einsparen wollte, schnell anderweitig ausgegeben. Klos ist daher überzeugt: „Entgegen landläufiger Meinung ist ein kollaborativer Roboterarbeitsplatz in der Industrie in aller Regel teurer als ein herkömmliche Roboterzelle.“
Wofür steht das K in MRK?
Daher rückt mehr und mehr in den Blickpunkt, dass das „K“ in MRK ohnehin nicht nur für „Kollaboration“ steht, sondern auch für „Koexistenz“ und „Kooperation“ – je nachdem, wie eng die Zusammenarbeit von Mensch und Roboter ist. Die Spannbreite reicht von der Koexistenz (Mensch und schutzzaunloser Roboter arbeiten in benachbarten Bereichen, haben aber keinen gemeinsamen Arbeitsraum) über die Kooperation (Mensch und Roboter teilen sich einen Arbeitsraum, arbeiten darin aber zu unterschiedlichen Zeitpunkten) bis hin zur echten Kollaboration (Mensch und Cobot haben hier einen gemeinsamen Arbeitsraum und arbeiten gleichzeitig am selben Bauteil).
Entsprechend unterscheidet die Norm für kollaborierende Roboter ISO TS 15066 auch vier Arten des MRK-Betriebs: Neben dem Spezialfall „Handführung“ sind dies
- Koexistenz mit „sicherheitsgerichtetem, überwachtem Halt“: Betritt der Werker die Zelle, stoppt der Roboter. Verlässt der Werker die Zelle wieder, läuft der Roboter automatisch wieder an.
- Kooperation durch „Abstands- und Geschwindigkeitsüberwachung“. Bei diesem Szenario stoppt der Roboter, wenn ein definierter Sicherheitsabstand unterschritten wird. Sobald der Sicherheitsabstand wieder passt, führt der Roboter seine Bewegungen weiter aus.
- Kollaboration: Für die direkte Interaktion und enge Kollaboration zwischen Mensch und Roboter kommt die „Leistungs- und Kraftbegrenzung“ zum Einsatz. Kraft und Druck, die der Roboter auf den Mitarbeiter ausüben kann, werden dabei technisch auf ein ungefährliches Maß begrenzt.
Auch Industrieroboter geeignet
Das zeigt: MRK im Sinne der Kooperation und Koexistenz kann also auch mit normalen Industrierobotern mit Geschwindigkeits- und Abstandsüberwachung umgesetzt werden, was natürlich insbesondere die Hersteller von Industrierobotern betonen. So sagt Stäublis Robotics-Chef Gerald Vogt: „Reine Assistenzroboter unterliegen deutlichen Einschränkungen hinsichtlich Traglast, Dynamik, Reichweite und Präzision. Genau das wollten wir nicht.“ Und auch ABBs Robotik-Chef Jörg Reger betont: „Wir bieten ein breites Portfolio an kollaborativen Automatisierungslösungen an. Dazu zählen neben unserem Cobot Yumi auch Industrieroboter, die mit der sicherheitszertifizierten Überwachungs- und Steuerungssoftware Safemove2 ausgestattet sind.“ Safemove2 könne jeden ABB-Industrieroboter zu einem kollaborativen Roboter machen, „sogar den IRB 8700, der eine 800 kg schwere Karosserie heben kann“.
Ähnlich argumentiert Dirk Schickedanz, General Manager Robotics Europe bei Nachi Robotics: „In 90 bis 95 Prozent aller Fälle ist eine kollaborative Anwendung gar nicht nötig, sondern es geht zum allerallergrößten Teil in den Bereich einer kooperierenden Anwendung. Und das können wir dank der Sicherheitszonen mit unserer Robot Monitor Unit schon sehr lange. Mit jedem unserer Roboter.“
Vielfältige Landschaft
Mittlerweile haben quasi alle Roboterhersteller entsprechende Funktionen für Safety-Zonen im Bewegungsraum ihrer Roboter integriert, damit der Roboter nicht langsam fahren muss, wenn gar kein Mensch in der Nähe ist. Und für die Überwachung des Arbeitsraums kommen immer neue Lösungen auf den Markt: Von der Trittschutzmatte über kompakte Laserscanner und 3D-Vision-Systeme bis hin zu Radarlösungen.
Wenn doch einmal ganz eng kollaboriert werden soll, kann der Roboter mit einer Schutzhaut (Safety Skin) umwickelt werden: Auch hier gibt es immer mehr Ansätze, um Kollisionen zwischen Mensch und Roboter zu erkennen: Von der mit Sensorik gespickten Schutzhaut (MRK Systeme, Bosch Apas) über die Überwachung des Luftdrucks in der Haut (Blue Danube) bis zur kostengünstigen Lösung mit leitfähigem Kunststoff (Koris). All das zeigt: Die Landschaft wird vielfältiger. Yaskawa-Manager Klos: „Nicht mehr kollaborative Robotik um jeden Preis ist die Devise, sondern die richtige Roboterlösung für den jeweiligen Einsatzfall.“
Themenseite Cobot & MRK
https://automationspraxis.industrie.de/cobot/
Wie werden Kollaboration und Kooperation abgesichert?
Anwendungen wie Koexistenz oder Kooperation werden meist mit Detektionslösungen wie Lichtschranken oder Trittmatten abgesichert. Ergänzend dazu kommen entsprechende Sicherheitsfunktionen der Robotersteuerungen zum Einsatz (Fanuc DCS, ABB Safemove), die verhindern, dass der Roboter in verbotene Zonen vorstößt. Da Mensch und Roboter hier weitgehend getrennt agieren, können bei Koexistenz oder Kooperation auch herkömmliche Industrieroboter eingesetzt werden.
In kollaborativen Szenarien reichen klassischen Detektionslösungen nicht mehr aus – es müssen Kräfte, Geschwindigkeiten und Verfahrwege der kollaborativen Roboter überwacht, beschränkt und die Cobots bei Bedarf gestoppt werden. Um Berührungen zwischen Mensch und Maschine komplett zu vermeiden, werden zum Beispiel Laserscanner, Vision-Systeme oder auch Verfahren wie Ultraschall und sogar Radar eingesetzt.
Wenn Berührungen nicht völlig vermieden werden sollen oder können, muss man zumindest versuchen die Kräfte und Drücke zu begrenzen, mit denen der Roboter auf den Menschen wirkt. Ein verbreitetes Mittel sind hier Kraft-Momenten-Sensoren in den Gelenken der Cobots, die bei Überschreitung der Kraft- und Druckwerte den kollaborativen Roboter stoppen. Zudem kommen spezielle Schutzhüllen zum Einsatz, die mit Sensorik auf Berührung und Druck reagieren std
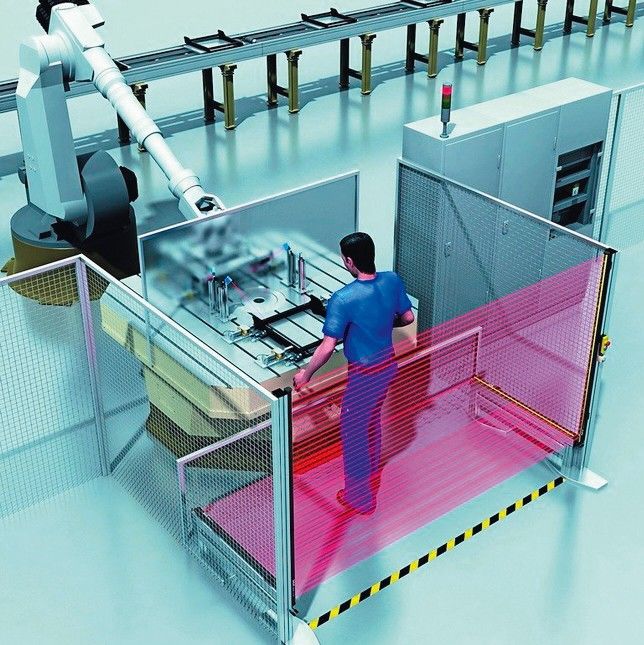 Koexistenz: Mensch und schutzzaunloser Roboter arbeiten in benachbarten Bereichen, haben aber keinen gemeinsamen Arbeitsraum. Ein Beispiel ist eine Einlegestation mit Drehtisch an einer Roboterzelle.
Koexistenz: Mensch und schutzzaunloser Roboter arbeiten in benachbarten Bereichen, haben aber keinen gemeinsamen Arbeitsraum. Ein Beispiel ist eine Einlegestation mit Drehtisch an einer Roboterzelle.Bild: Sick
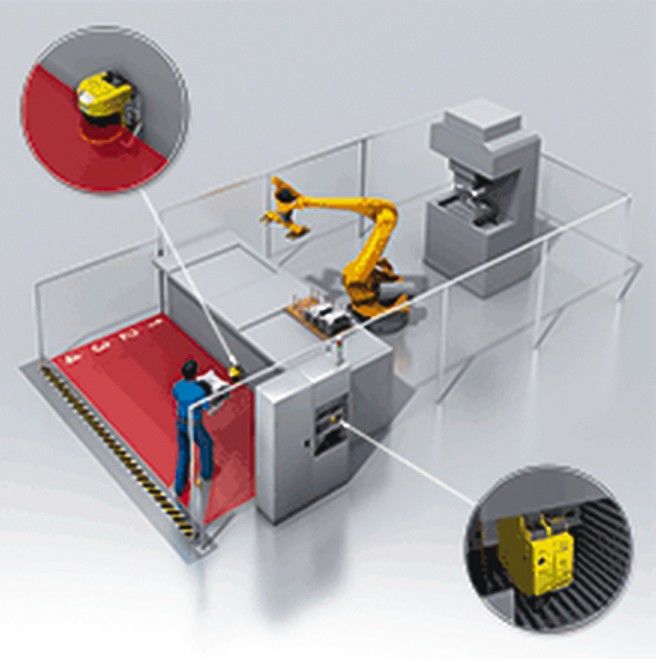 Kooperation: Hier teilen sich Mensch und Maschine einen Arbeitsraum, arbeiten darin aber zu unterschiedlichen Zeitpunkten. Ein Beispiel ist eine Übergabestation, in der zuerst der Mensch ein Teil einlegt und der Roboter dieses danach dort abholt.
Kooperation: Hier teilen sich Mensch und Maschine einen Arbeitsraum, arbeiten darin aber zu unterschiedlichen Zeitpunkten. Ein Beispiel ist eine Übergabestation, in der zuerst der Mensch ein Teil einlegt und der Roboter dieses danach dort abholt.Bild: Sick
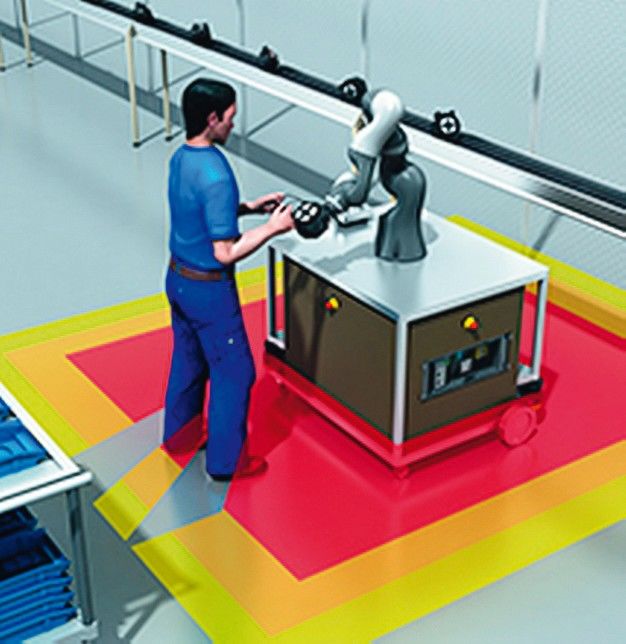 Kollaboration beschreibt die engste Form der Zusammenarbeit. Mensch und Cobot haben hier einen gemeinsamen Arbeitsraum und arbeiten gleichzeitig am selben Bauteil. Ein Beispiel ist eine Montagestation, wo Mensch und Roboter Aufgaben am gleichen Bauteil erledigen.
Kollaboration beschreibt die engste Form der Zusammenarbeit. Mensch und Cobot haben hier einen gemeinsamen Arbeitsraum und arbeiten gleichzeitig am selben Bauteil. Ein Beispiel ist eine Montagestation, wo Mensch und Roboter Aufgaben am gleichen Bauteil erledigen.Bild: Sick
Das K in MRK
1. Koexistenz: Mensch und Roboter arbeiten zwar in benachbarten Bereichen, haben aber keinen gemeinsamen Arbeitsraum. Ein Beispiel ist eine Einlegestation mit einem Drehtisch an einer Roboterzelle.
2. Kooperation: Mensch und Maschine teilen sich einen Arbeitsraum, arbeiten darin aber zu unterschiedlichen Zeitpunkten. Ein Beispiel ist eine Übergabestation, in der zuerst der Mensch ein Teil einlegt und der Roboter dieses danach dort abholt.
3. Kollaboration: Mensch und Cobot haben hier einen gemeinsamen Arbeitsraum und arbeiten gleichzeitig am selben Bauteil. Ein Beispiel ist eine Montagestation, wo Mensch und Roboter unterschiedliche Aufgaben am gleichen Bauteil erledigen.
Mehr zum Thema Robotik aus Odense

Hier finden Sie mehr über:









{kind=link}